We have been working almost exclusively with the rectangular coordinate system \((x,y,z)\) so far in \(\R^3\text{.}\) There are in fact other ways to describe points in \(\R^3\text{,}\) and sometimes these alternative coordinate systems can make our lives a lot easier!
In this section, we are going to expand our toolkit by introducing two new coordinate systems: cylindrical coordinates and spherical coordinates. These systems are designed specifically to make working with cylinders and spheres much more natural.
locate points in \(\R^3\) using cylindrical and spherical coordinates and understand the geometric meaning of each component (like \(r\text{,}\)\(\rho\text{,}\)\(\theta\text{,}\) and \(\phi\)).
Recall back in Section 12.2, we defined rectangular coordinates in \(\R^3\) using an ordered triple \((x,y,z)\text{,}\) where \(x\text{,}\)\(y\text{,}\) and \(z\) measure the directed distances along the \(x\)-, \(y\)-, and \(z\)-axes, respectively. This is a direct extension of the rectangular coordinate system in \(\R^2\text{.}\)
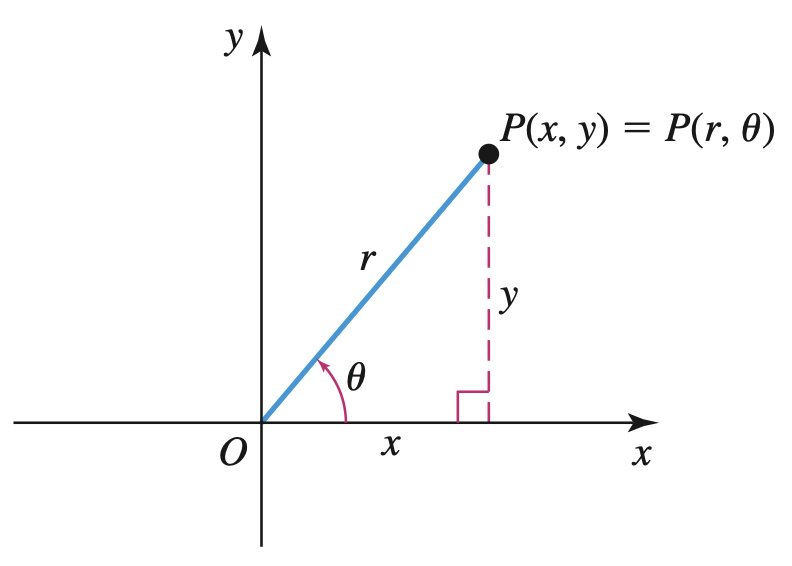
Back in MTH 253 or MTH 253Z, you may learn about another coordinate system in \(\R^2\) called polar coordinates. In polar coordinates, a point in the plane is represented by an ordered pair \((r,\theta)\text{,}\) where \(r\) is the directed distance from the pole to the point, and \(\theta\) is the angle formed by the positive \(x\)-axis and the line segment connecting the pole to the point.
The polar coordinate system can also be extended to \(\R^3\text{,}\) and there are two common ways to do so. In this section, we will investigate both of these extensions, and they are the cylindrical coordinates and spherical coordinates.
In polar coordinates plane, there is a pole and a polar axis. To translate these terms to rectangular coordinates plane, the pole corresponds to the origin and the polar axis corresponds to the positive \(x\)-axis.
To plot a point in polar coordinates, we start at the pole, rotate \(\theta\) radians about the pole in the counterclockwise direction (if \(\theta\) is positive) or clockwise direction (if \(\theta\) is negative), and then move \(r\) units along the ray formed by the rotation. If \(r\) is positive, we move in the same direction as the ray; if \(r\) is negative, we move in the opposite direction of the ray.
If you learn about polar coordinates from Richard (well none of you did), Richard likes to use the grid shown below to help students visualize polar coordinates plane.
Figure12.7.1.Polar Coordinates Plane with Grid, where the concentric circles represent different values of \(r\text{,}\) and the lines radiating from the pole represent different values of \(\theta\)
Now that we have another coordinate system in \(\R^2\text{,}\) it is important to know how to convert between rectangular coordinates and polar coordinates. We can figure out the conversion formulas by constructing a right triangle with legs parallel to the \(x\)- and \(y\)-axes, and the hypotenuse connecting the origin to the point \((x,y)\text{.}\)
Just be careful that the radius \(r\) can be negative here, and the angle \(\theta\) may not be in the range of the inverse tangent function \(\lp -\frac{\pi}{2}, \frac{\pi}{2} \rp\text{.}\) Remember to adjust \(r\) and \(\theta\) accordingly!
We will not go in further detail about polar coordinates here since this is just a review. Feel free to refer back to your MTH 253 or MTH 253Z notes if you need a refresher on this topic. Here is the lecture notes when Richard taught polar coordinates in MTH 112Z before (just in case you want to know more about polar coordinates).
Cylindrical coordinates in \(\R^3\) is one way to extend polar coordinates in \(\R^2\text{.}\) Imagine we plot a point in polar coordinates plane, then we can create a circle using the radius \(r\text{.}\) The \(\theta\) value will determine where the point is located on the circle. There is no "height" of this point yet since we are still in \(\R^2\text{.}\)
One way to do so is to assign a "height" value \(z\) to the point. If we move the circle up or down along the \(z\)-axis, we really create a cylinder to locate the point in \(\R^3\text{.}\)
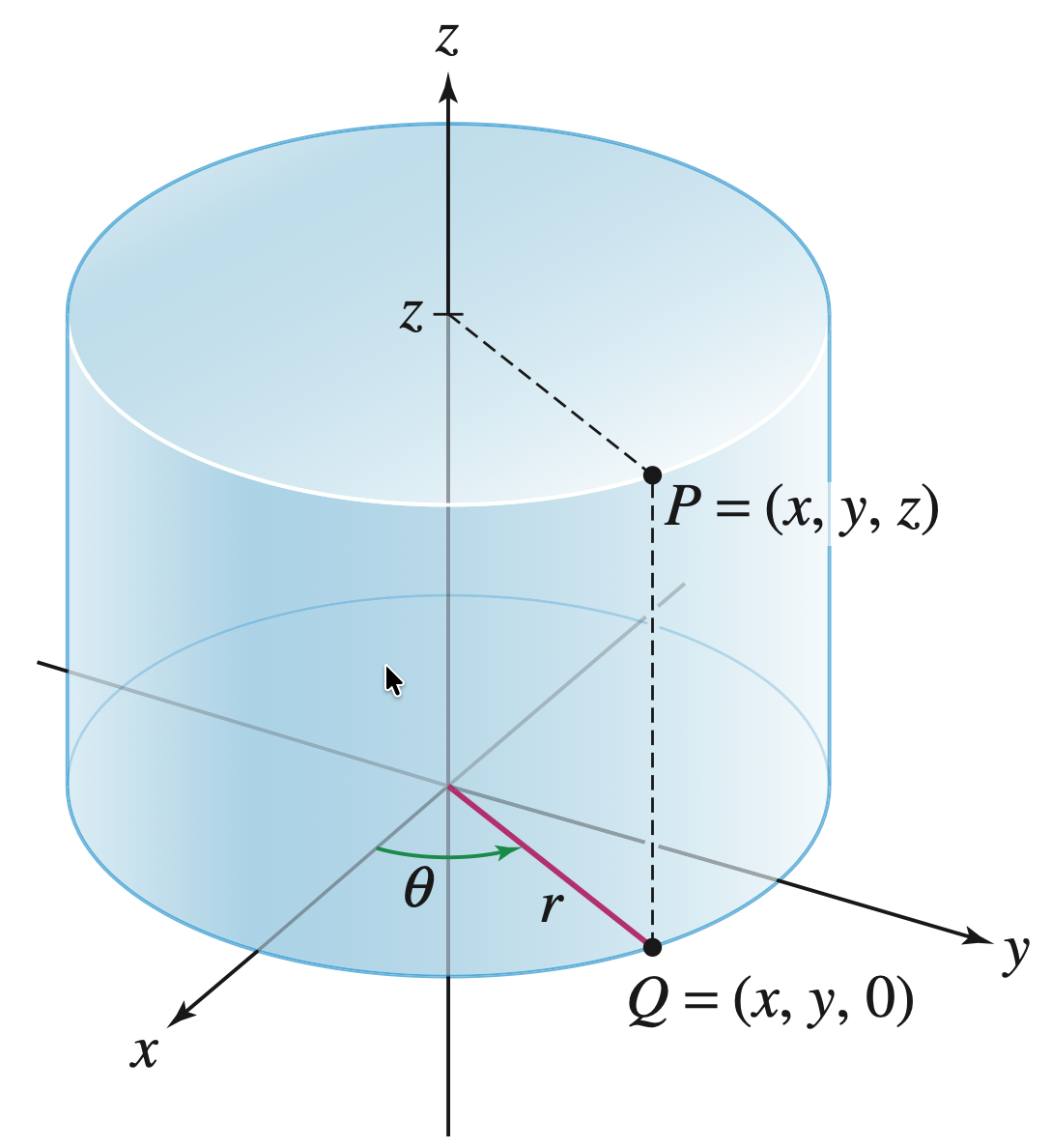
That is, we can represent a point in \(R^3\) using the ordered triple \((r,\theta,z)\text{,}\) where \((r,\theta)\) are the polar coordinates of the projection of the point onto the \(xy\)-plane, and \(z\) is the directed distance from the \(xy\)-plane to the point. This ordered triple \((r,\theta,z)\) is called the cylindrical coordinates of the point.
Similar to polar coordinates, it is important to know how to convert between rectangular coordinates and cylindrical coordinates. The conversion formulas on the \(xy\)-plane are the same as the polar coordinates formulas (since we literally construct the cylindrical coordinates using polar coordinates on the \(xy\)-plane), and we just add the \(z\) coordinate as is.
As always, Richard included a visual below to help you better understand the geometry of cylindrical coordinates. Our goal here is to find the values of \(r\text{,}\)\(\theta\text{,}\) and \(z\) for the point \(P\text{.}\)
Recall the way we build the cylindrical coordinates is to extend polar coordinates by introducing the "height" of the point along the \(z\)-axis. The \(xy\)-plane on which we do all the fun polar coordinates stuff on is called the level surface\(z = 0\)
The level surface is a surface obtained by setting one of the coordinates to be constant. In rectangular coordinates, the level surfaces are the coordinate planes discussed in Section 12.2.
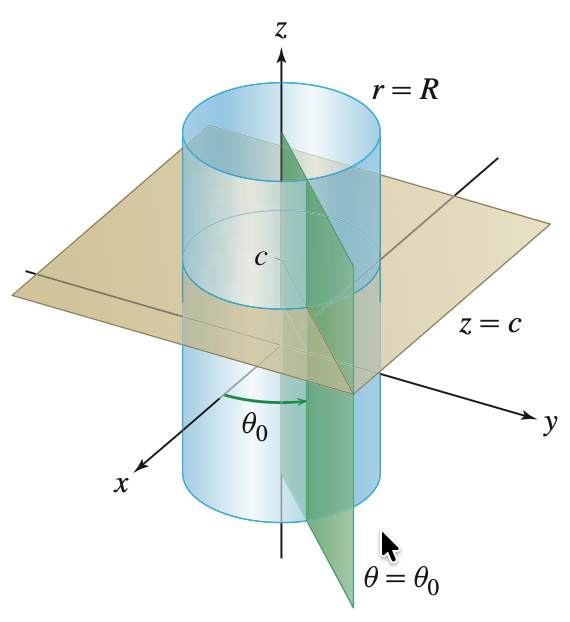
Yet, not all level surfaces are planes in cylindrical coordinates. Let’s think it through together. If we set \(z = c\text{,}\) where \(c\) is a constant, then we are just looking at a horizontal plane intersecting the \(z\)-axis at \(z = c\text{.}\)
If we set \(r = R\text{,}\) where \(R\) is a constant, then we are looking at all the points that are \(R\) units away from the \(z\)-axis, regardless of the \(z\)-coordinate. This creates a right circular cylinder of radius \(R\) centered along the \(z\)-axis.
If we set \(\theta = \theta_0\text{,}\) where \(\theta_0\) is a constant, then we are looking at all the points that form an angle of \(\theta_0\) with the positive \(x\)-axis when projected onto the \(xy\)-plane. Taking all possible z-values, this creates a half-plane originating from the \(z\)-axis and making an angle of \(\theta_0\) with the \(xz\)-plane.
But why do we care about level surfaces? One of the reasons is that level surfaces can help us visualize surfaces defined in cylindrical coordinates rather than imagining the whole 3-dimensional graph at once. The level surfaces can act as "slices" of the surface to help us understand the overall shape of the surface.
Sketch the set \(\left\{(r,\theta,z) \mid 1 \leq r \leq 3, \quad 0 \leq \theta \leq \dfrac{\pi}{2}, \quad 0 \leq z \leq 4 \right\}\) described in cylindrical coordinates.
Observe that the three coordinates are all bounded in some way. Instead of trying to imagine the whole 3-dimensional shape at once, we can analyze the level surfaces to help us sketch the shape step by step.
Let’s start by analyzing the level surfaces one by one! The level surface \(r = 1\) is a right circular cylinder of radius 1 centered along the \(z\)-axis, and the level surface \(r = 3\) is another right circular cylinder of radius 3 centered along the \(z\)-axis. The region between these two cylinders is a hollow cylindrical shell.
The level surface \(\theta = 0\) is the half \(xz\)-plane, and the level surface \(\theta = \frac{\pi}{2}\) is the half \(yz\)-plane. The region between these two half-planes is a quarter of the hollow cylindrical shell we obtained above.
The level surface \(z = 0\) is the \(xy\)-plane, and the level surface \(z = 4\) is a horizontal plane intersecting the \(z\)-axis at \(z = 4\text{.}\) The region between these two planes is a vertical slice of the quarter hollow cylindrical shell we obtained above.
Putting these three regions together, we obtain a quarter of a hollow cylindrical shell with inner radius 1, outer radius 3, and height 4, as shown in the diagram below.
Spherical coordinates in \(\R^3\) is another way to extend polar coordinates in \(\R^2\text{.}\) Instead of directly lifting the point in polar coordinates up or down to create a cylinder, we can create a sphere by rotating the radius up and down.
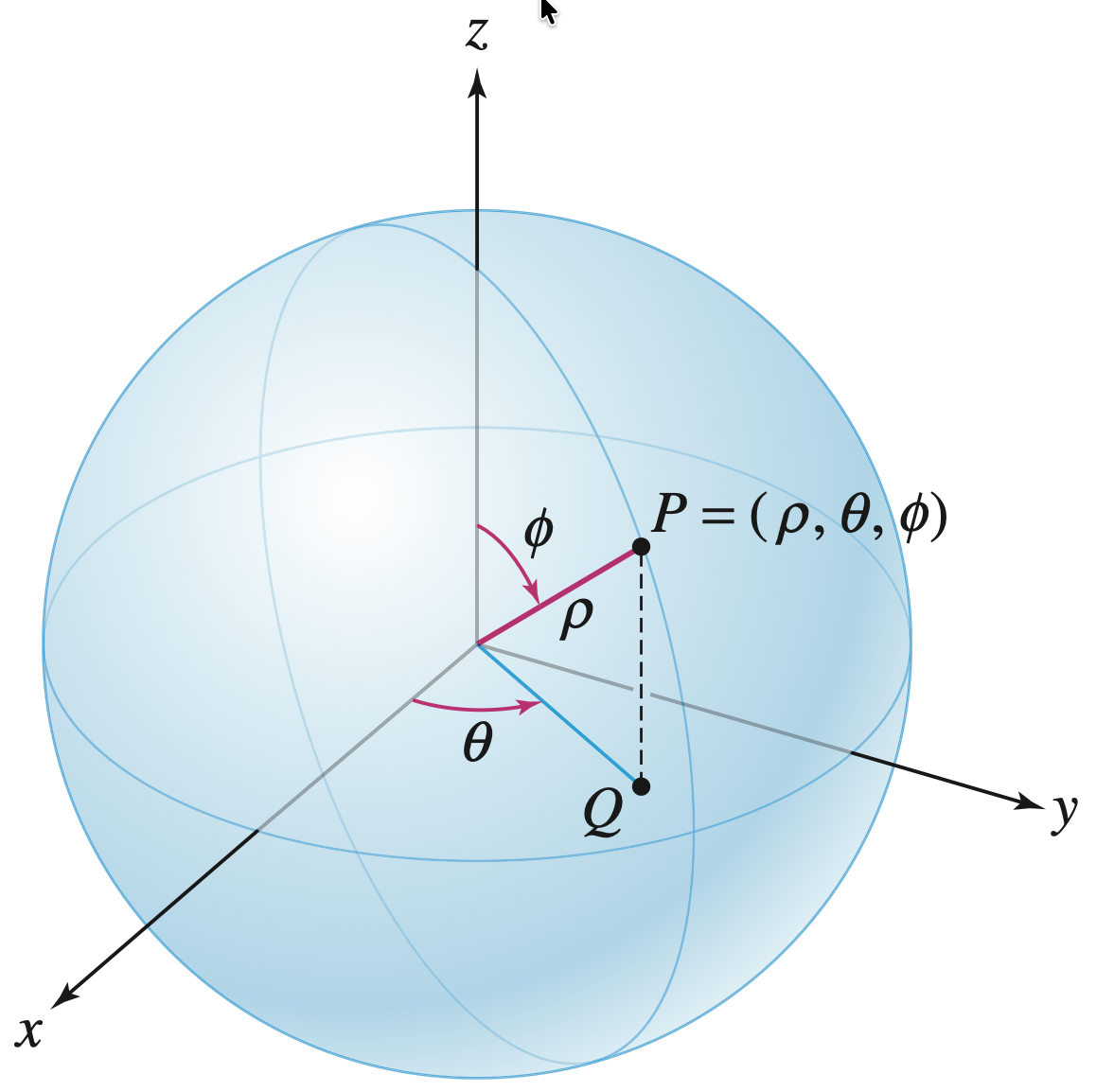
As indicated in the diagram above, we can create a sphere by knowing the radius and two different types of angles:
\(\rho\) is the directed distance from the origin to the point (aka the radius of the sphere). Since the radius of the sphere should be the same as the radius of the \(xy\)-trace, this value should match up with \(r\) in polar/cylindrical coordinates.
\(\theta\) is the polar angle of projection onto the \(xy\)-plane, which is the same as the angle in polar/cylindrical coordinates (the standard angle rotation from the positive \(x\)-axis to the projection of the point onto the \(xy\)-plane).
\(\phi\) is the angle of declination, which measures how much we rotate the radius down from the top of the sphere along the \(z\)-axis (declines from the vertical).
Feel free to play with the applet below to get a better understanding of spherical coordinates and how the three coordinates work together to locate a point in \(\R^3\text{!}\)
P.S.: you may want to open the applet in GeoGebra directly using the link above to get the full menu and controls. Richard is a bit sick of trying to figure out how to make the embedded applet work properly with scaling and full controls...
Now that we know how spherical coordinates work, it is important to know how to convert between rectangular coordinates and spherical coordinates. The only thing we can carry over from polar/cylindrical coordinates is the angle \(\theta\text{.}\) So we have the conversion formula
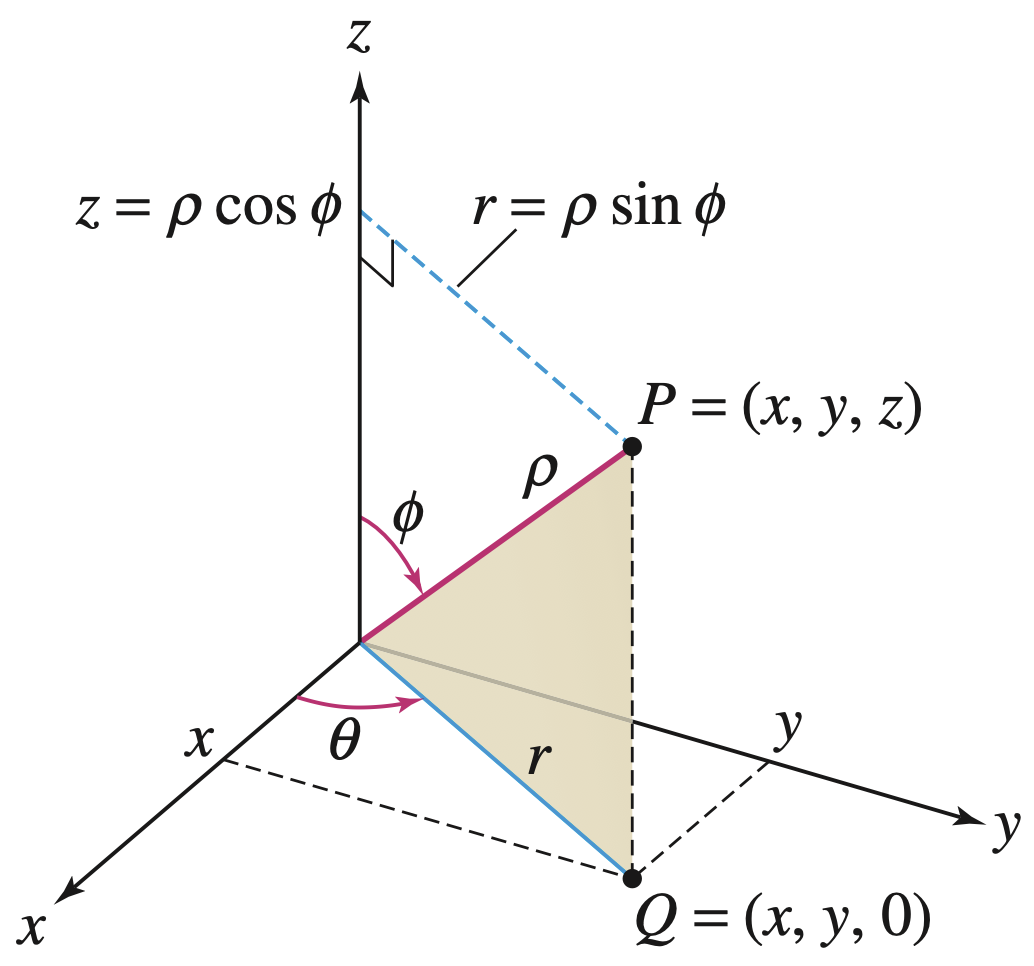
\(\phi\) is a bit tricky to relate. One of the reasons why we define \(\phi\) as the angle of declination is that it allows us to construct a right triangle with legs parallel to the \(xy\)-plane and the \(z\)-axis, and the hypotenuse being the radius \(\rho\) (see the diagram below). Using this right triangle, we have the conversion formula
The diagram above can also help us convert from spherical coordinates to rectangular coordinates. \(z\) is the most straightforward to relate since it is just the vertical leg of the right triangle. Therefore, we have the conversion formula
\begin{equation*}
z = \rho \cos(\phi)
\end{equation*}
To relate \(x\) and \(y\) to spherical coordinates, we can first find the radius of the \(xy\)-trace using the right triangle. This radius is just \(r = \rho \sin(\phi)\text{.}\) Then we can use the polar coordinates conversion formulas to find \(x\) and \(y\) as follows:
\begin{equation*}
x = r \cos(\theta) = \rho \sin(\phi) \cos(\theta) \qquad \text{ and } \qquad y = r \sin(\theta) = \rho \sin(\phi) \sin(\theta)
\end{equation*}
As always, Richard included a visual below to help you better understand the geometry of spherical coordinates. Our goal here is to find the values of \(\rho\text{,}\)\(\theta\text{,}\) and \(\phi\) for the point \(P\text{.}\)
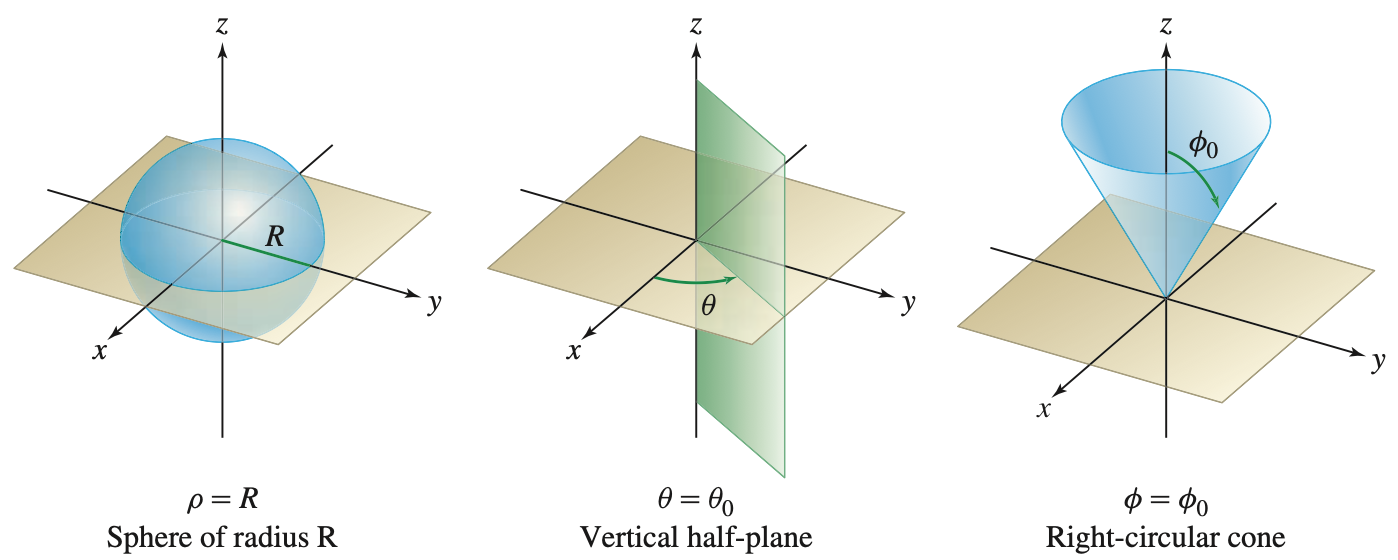
What about the level surfaces in spherical coordinates? Similar to cylindrical coordinates, we can fix one of the three spherical coordinates and let the other two vary to see what kind of surface is formed.
Fixing \(\rho = R\) (a constant) gives us a sphere of radius \(R\) centered at the origin.
Fixing \(\phi = \phi_0\) (a constant) gives us a cone with its vertex at the origin and its axis along the \(z\)-axis. The angle between the axis and the surface of the cone is \(\phi_0\text{.}\)
Sketch the set \(\left\{(\rho,\theta,\phi) \mid \rho = 1, \quad \dfrac{\pi}{3} \leq \phi \leq \dfrac{2\pi}{3} \right\}\) described in spherical coordinates.
Now consider the bounds on \(\phi\text{.}\) By setting \(\phi\) to be the two bounds should give us two level surfaces that restrict the region of the sphere we want to sketch.
The two level surfaces for \(\phi = \dfrac{\pi}{3}\) and \(\phi = \dfrac{2\pi}{3}\) are cones that intersect the sphere \(\rho = 1\text{.}\) The region described is the "band" on the sphere between these two cones. The sketch is shown below.
Now that we learned two new coordinate systems in \(\R^3\text{,}\) then the next natural question to ponder is how to convert coordinates between these two coordinates?
Well there is a straightforward way to do this by using rectangular coordinates as an intermediary! If you are not satisfied with this method and want to figure out the conversion formulas directly, feel free to give it a try as an exercise (and this is not difficult at all! You will just need to pick up a lot of the clues here and there!).
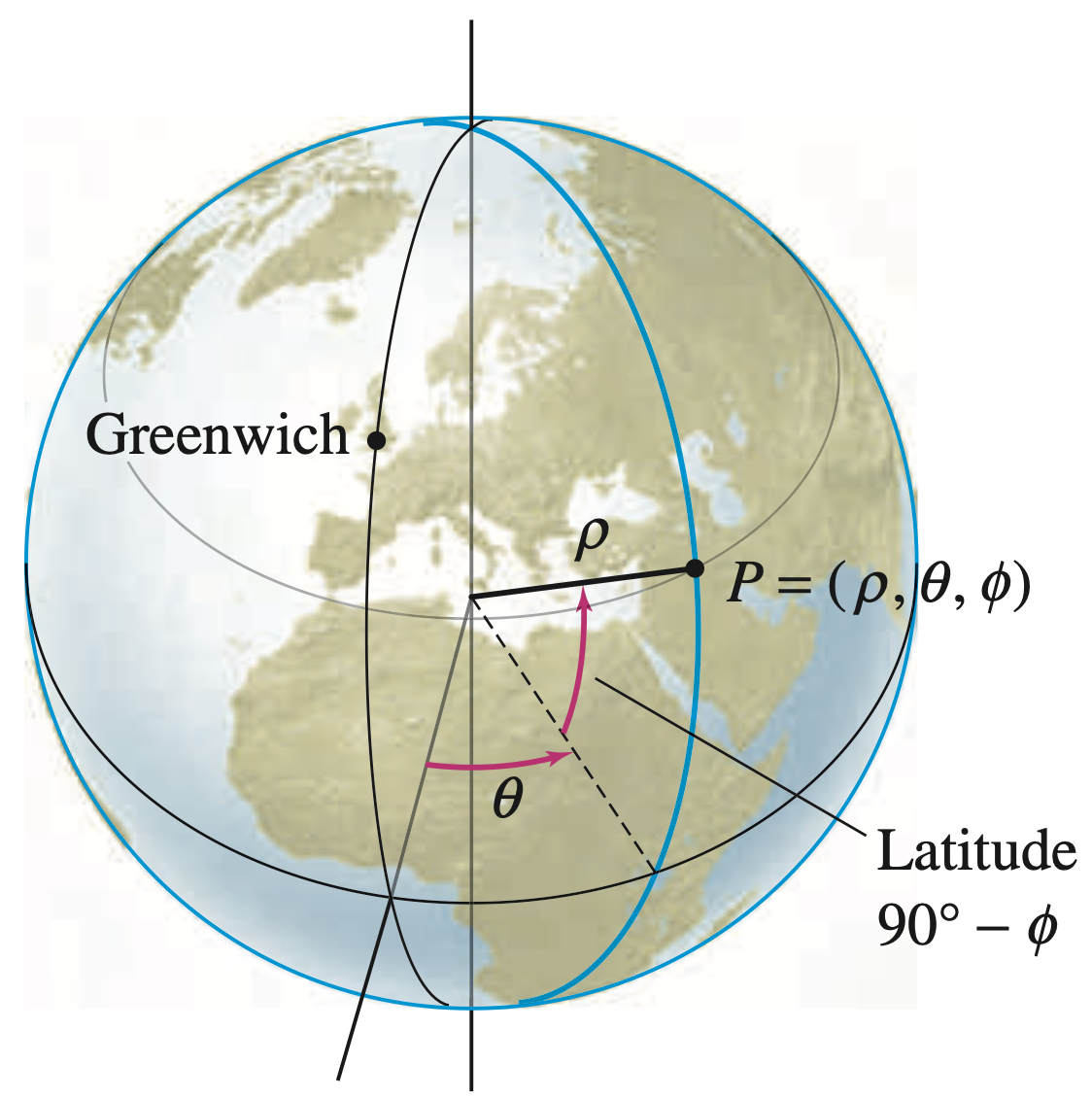
You may be wondering why bother extending the polar coordinates to spherical coordinates when we already have cylindrical coordinates (and the "height" of the point is a lot easier to deal with)? Well the most obvious answer is that we live on the planet of earth, which is (approximately) a sphere! We can locate things easier on earth using spherical coordinates.
The two types of angles, \(\theta\) and \(\phi\text{,}\) are the two measures we often use to locate points on the surface of earth.
A longitude is the angle measured East or West from the prime meridian (which runs through Greenwich, England). It ranges from \(-180^\circ\) (West) to \(180^\circ\) (East).
If we align the prime meridian with the positive \(x\)-axis, then the longitude corresponds to \(\theta\) (just be mindful of the range and the direction of \(\theta\))
This is similar to \(\phi\text{,}\) but with a slight modification (recalibration). Since \(\phi\) measures the angle of declination from the North Pole, we can convert latitude to \(\phi\) using the formula \(\text{latitude} = 90^\circ - \phi\) (so we basically recalibrate the value of \(\phi\) to measure from the equator instead of the North Pole).
We will look at more applications to the cylindrical and spherical coordinates in later chapters. The two new coordinates systems are very useful in integration and vector calculus!
The problems listed below are assigned to be included in your problem set portfolio. Note that a specific selection of these problems will also form the written homework assignments. I recommend working through all of them to ensure a solid grasp of the material. Reach out to Richard for help if you get stuck or have any questions.
The solutions will be posted after the written homework due dates. If you have any questions about your work, talk to Richard and he is happy to discuss the process with you.
Since the point \((x,y) = \lp \frac{5}{\sqrt{2}}, \frac{5}{\sqrt{2}} \rp\) is in the first quadrant, we know that \(0 \leq \theta \leq \frac{\pi}{2}\text{.}\) Therefore,
The projection of the points in this set onto the \(xy\)-plane are points on the \(y\)-axis, thus \(\theta = \frac{\pi}{2}\) or \(\theta = \frac{3\pi}{2}\text{.}\) Therefore,
\begin{equation*}
y = r\sin\lp \frac{\pi}{2} \rp = r\cdot 1 = r \qquad \text{or} \qquad y = r\sin\lp \frac{3\pi}{2} \rp = -r
\end{equation*}
In both cases, \(y^2 = r^2\text{,}\) thus the inequality \(y^2 + z^2 \leq 4\) becomes \(r^2 + z^2 \leq 4\text{.}\) In cylindrical coordinates, we obtain the following inequality
The region \(1 \leq r \leq 3\text{,}\)\(0 \leq z \leq 4\) is a hollow cylinder with inner radius 1, outer radius 3, and height 4. The sketch is shown below.
The angular coordinate \(\theta\) satisfies \(0 \leq \theta \leq \frac{\pi}{2}\text{,}\) since the point \((x,y) = \lp \frac{1}{2}, \frac{\sqrt{3}}{2} \rp\) is in the first quadrant. Then we have
We are given that \(\rho = 4\text{,}\)\(\theta = 0\text{,}\) and \(\phi = \frac{\pi}{4}\text{.}\) To find \(r\text{,}\) we use the formulas \(x = r\cos(\theta)\) and \(x = \rho\cos(\theta)\sin(\phi)\) to get
The equality \(x = 0\) determines that \(\theta = \frac{\pi}{2}\) or \(\theta = \frac{3\pi}{2}\) (and the origin). In both cases, \(\sin^2(\theta) = 1\text{.}\) Hence, we get
An apple modeled by taking all the points in and on a sphere of radius \(2\) inches is cored with a vertical cylinder of radius \(1\) in. Use inequalities in cylindrical coordinates to describe the set of all points that remain in the apple once the core is removed.
The sphere together with its interior is, in rectangular coordinates, the set of points with \(x^2 + y^2 + z^2 \leq 4\text{.}\) In cylindrical coordinates, this is the set of points with \(r^2 + z^2 \leq 4\text{.}\) So we can parametrize the sphere and its interior as
\begin{equation*}
-2 \leq z \leq 2 \qquad \text{and} \qquad 0 \leq r \leq \sqrt{4 - z^2}
\end{equation*}
The vertical cylinder together with its interior is parametrized by \(r \leq 1\text{.}\) The cylinder intersects the sphere when \(1^2 + z^2 = 4\text{,}\) or \(z = \pm \sqrt{3}\text{.}\) When \(|z| \gt \sqrt{3}\text{,}\) all points in the sphere lie inside the cylinder, so are gone when the cylinder is removed. So removing the cylinder from the sphere gives a set of points parametrized as
\begin{equation*}
-\sqrt{3} \lt z \lt \sqrt{3} \qquad \text{and} \qquad 1 \leq r \leq \sqrt{4 - z^2}
\end{equation*}