Section12.3Dot Product and the Angle Between Two Vectors
So far, our operations on vectors (addition and scalar multiplication) have resulted in new vectors. But what if we want to “multiply” two vectors together? It turns out there isn’t just one way to do this.
In this section, we introduce the dot product (also known as the scalar product). The dot product of two vectors will tell us how much is one vector pointing in the same direction as another.
Note12.3.2.You may heard of the dot product in linear algebra before....
You may hear of the term inner product if you took a linear algebra class before. The dot product is a specific example of an inner product defined on \(\R^n\) (called the standard inner product).
This section is highly similar to what you may have learned about the inner product in linear algebra. In addition to the theoretical aspects, we will also focus on applications of the dot product in physics.
Observe that we can find the dot product of two vectors by multiplying their corresponding components and adding the results. This is true in \(\R^2\) (or \(\R^n\) in general) as well.
Remember that the dot product of two vectors results in a scalar (a real number) and not another vector. The dot product has several useful properties that we summarize in the following theorem.
The proofs of the properties are pretty straightforward using the definition of the dot product. Richard will prove some of them in \(\R^3\) and leave the rest as exercises for you to verify (especially if you are thinking about majoring in math). You may also want to see if you are convinced that Richard’s proofs can be generalized to \(\R^n\text{.}\)
Using these properties, we can prove some cool results! For example, do you know that the sum of the squares of the lengths of the four sides of a parallelogram is equal to the sum of the squares of the lengths of its two diagonals? This is also known as the parallelogram law.
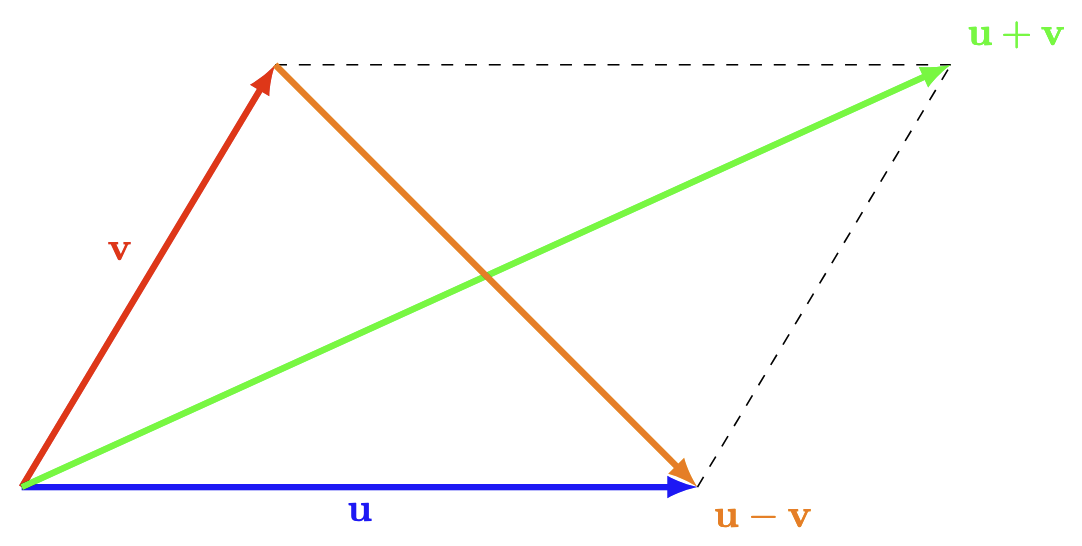
Prove the parallelogram law using the properties of the dot product. The diagram below shows a parallelogram formed by the vectors \(\v{u}\) and \(\v{v}\text{.}\)
The parallelogram has two diagonals with the lengths of \(\|\v{u} + \v{v}\|\) and \(\|\v{u} - \v{v}\|\text{.}\) Also, the sides have lengths of \(\|\v{u}\|\) and \(\|\v{v}\|\text{,}\) respectively.
We are learning about the dot product so let’s get some dot products involved! One of the dot product properties states that \(\|\v{v}\|^2 = \v{v} \cdot \v{v}\) so converting all the lengths into dot products is a good start!
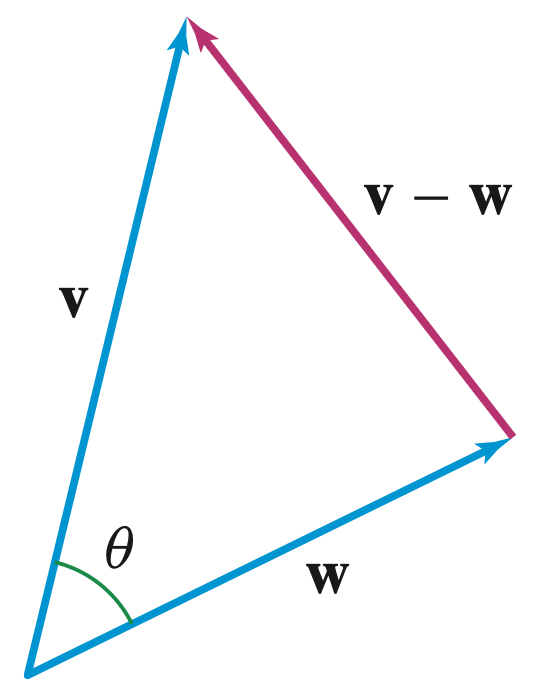
Let’s say we have two vectors, \(\v{v}\) and \(\v{w}\text{.}\) We call the angle between them \(\theta\) and we can construct the vector \(\v{v} - \v{w}\) as shown below:
This is essentially a triangle if we drop all the direction arrows. That is, this triangle has sides of lengths \(\|\v{v}\|\text{,}\)\(\|\v{w}\|\text{,}\) and \(\|\v{v} - \v{w}\|\text{.}\)
We essentially found two ways to represent the quantity \(\|\v{v} - \v{w}\|^2\text{.}\) Equating these two expressions together and canceling stuff, we obtain
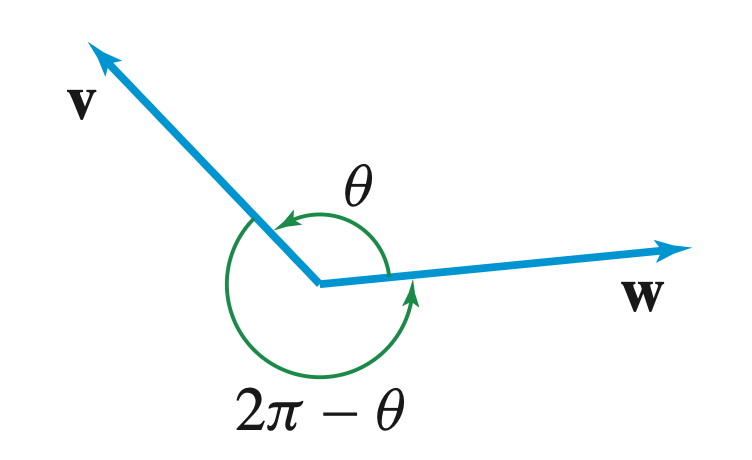
Observe that the angle is being computed using the inverse cosine function. The range of the inverse cosine function is \([0,\pi]\text{.}\) That is, we consider the angle between two vectors to be the smaller angle formed between them.
We denote \(\v{v} = \la 3,1,1 \ra\) and \(\v{w} = \la 2,-4,2 \ra\text{.}\) To use the formula for the cosine of the angle \(\theta\) between two vectors we need to compute the following values:
We denote \(\v{v} = \la 0,1,1 \ra\) and \(\v{w} = \la 1,-1,0 \ra\text{.}\) To use the formula for the cosine of the angle \(\theta\) between two vectors we need to compute the following values:
We denote \(\v{v} = \la 1,1,-1 \ra\) and \(\v{w} = \la 1,-2,-1 \ra\text{.}\) To use the formula for the cosine of the angle \(\theta\) between two vectors we need to compute the following values:
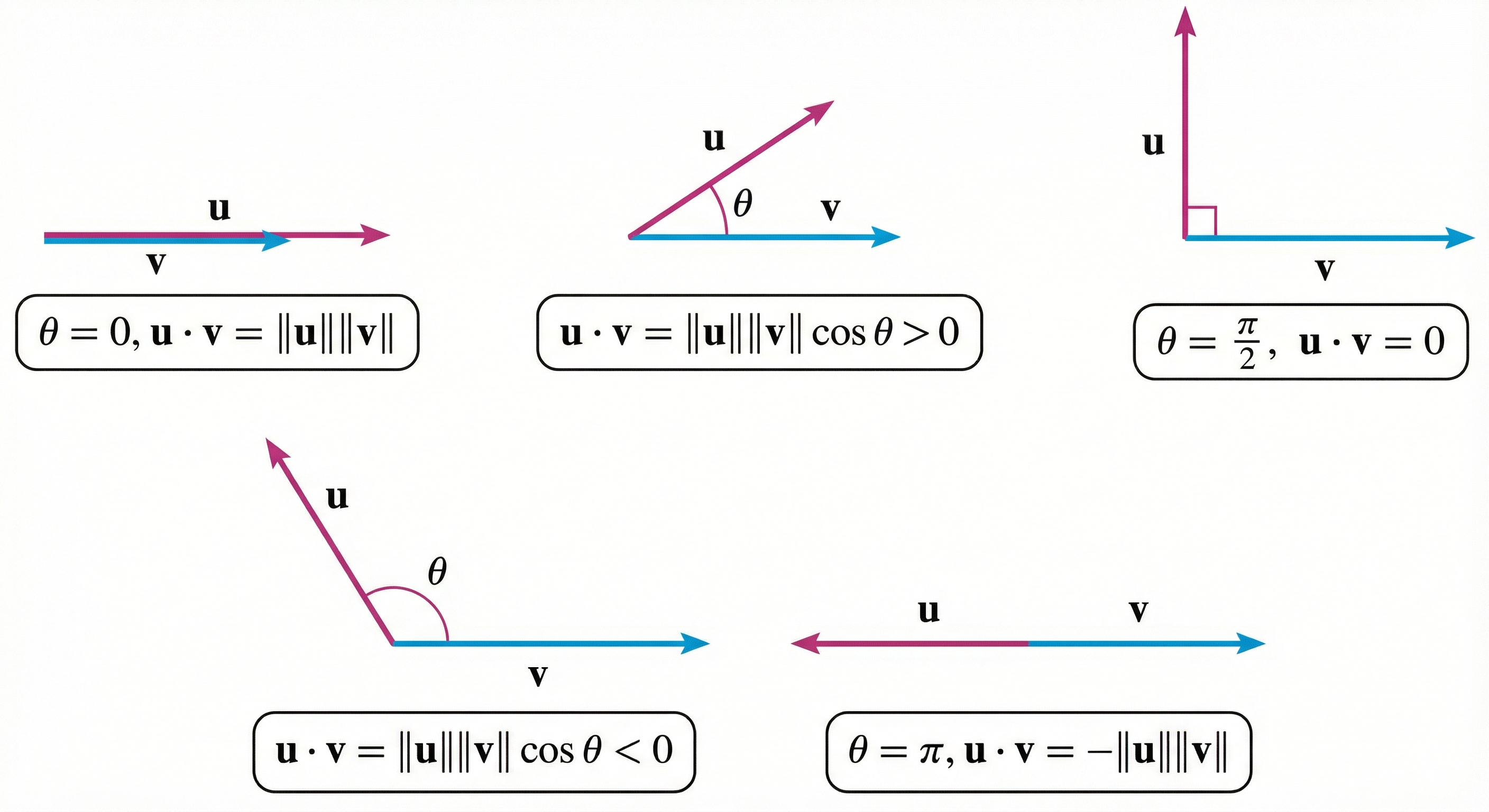
This is true since we know that \(\cos(\theta)\) is positive for acute angles, negative for obtuse angles, and zero for right angles. In addition, \(\cos(\theta) = 1\) when \(\theta = 0^\circ\) and \(\cos(\theta) = -1\) when \(\theta = 180^\circ\text{.}\) Let’s summarize this in a nice little diagram.
This diagram is really demonstrating the famous Cauchy-Schwarz Inequality, which states that the absolute value of the dot product of two vectors is always less than or equal to the product of their individual lengths. Symbolically, this is stated as
Observe from the figure that \(-1 \lt \cos(\theta) \lt 1\text{,}\) so \(\v{u} \cdot \v{v}\text{,}\) which equals to \(\|\v{u}\| \|\v{v}\| \cos(\theta)\text{,}\) cannot be greater than \(\|\v{u}\| \|\v{v}\|\text{.}\)
Of course you can draw a picture to see why this is true but this way isn’t rigorous enough. True story, one of Richard’s students tried to prove the inequality by drawing a loosey-goosey triangle and "eyeballing" the lengths of the sides of the triangle... Not rigorous at all...
We want to show that this inequality is true for ALL triangles without relying on the accuracy of a drawing. Relying on definitions, properties, theorems, and algebraic manipulations is a better way to go!
Richard will help you get started. We are learning about the dot product so let’s get some dot products involved! One of the dot product properties states that \(\|\v{v}\|^2 = \v{v} \cdot \v{v}\) so converting all the lengths into dot products is a good start!
Perpendicularity/Perpendicular is a geometric term that describes two things (like lines, planes, etc.) intersect at a right angle (90°). This idea only makes sense in a geometric context where we can visualize angles.
Orthogonality/Orthogonal is an algebraic term that describes two vectors whose dot product is zero. This idea makes sense in any dimension and doesn’t rely on visualizing angles. For example, the zero vector is orthogonal to every vector but it doesn’t make sense to say that the zero vector is perpendicular to every vector since the zero vector doesn’t have a length (we don’t say a point is perpendicular to a line).
Surprise surprise, there is another term that describes the same idea in math: normality/normal. Normality is often used to describe things that are orthogonal/perpendicular to a surface/plane/line. For example, a normal vector to a plane is a vector that is orthogonal to every vector lying in that plane.
Remember that the dot product is distributive! That is, we can FOIL this expression out like we would with regular multiplication. Then we can use the properties of the dot product with the basis vectors to simplify!
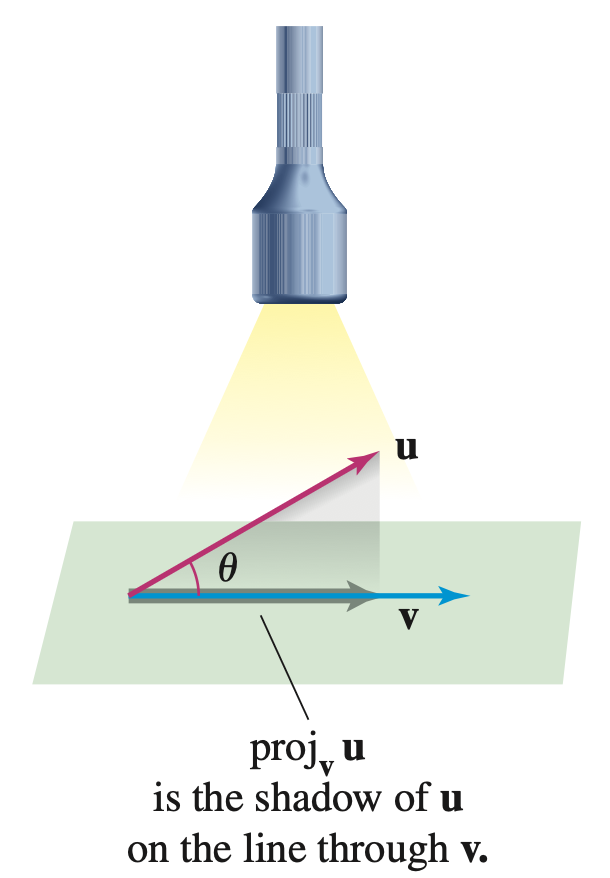
Remember that the dot product should tell us something about how much one vector goes in the direction of another vector. You may get the idea that the sign of the dot product tells us whether the vectors point in similar directions (acute angle) or opposite directions (obtuse angle). But we can actually know more! The orthogonal projection of one vector onto another vector, which is obtained using the dot product, gives us a precise way to measure how much one vector goes in the direction of another vector.
Let’s say we have two vectors \(\v{u}\) and \(\v{v}\) and we cast a shadow of \(\v{u}\) on the light through \(\v{v}\text{.}\) This shadow is called the orthogonal projection of \(\v{u}\) onto \(\v{v}\) and is denoted by \(\proj_{\v{v}} \v{u}\text{.}\)
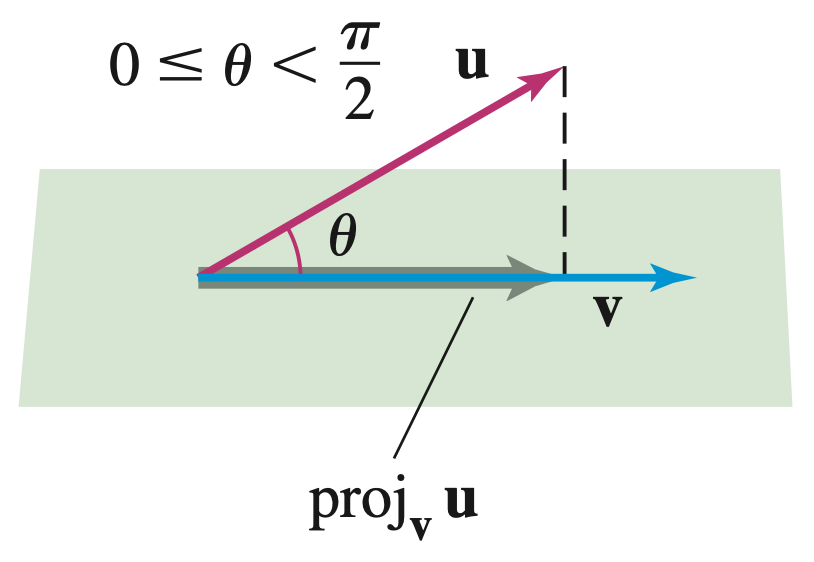
Let’s assume two vectors are pointing in the same(ish) direction, which means the angle between them is acute. The diagram is shown below and our goal is to find the length and the direction of the projection vector.
Let’s tackle the length first. Using trigonometry (and yes there is a right triangle in there somewhere that allows us to use trig), we see that the length of the projection vector is
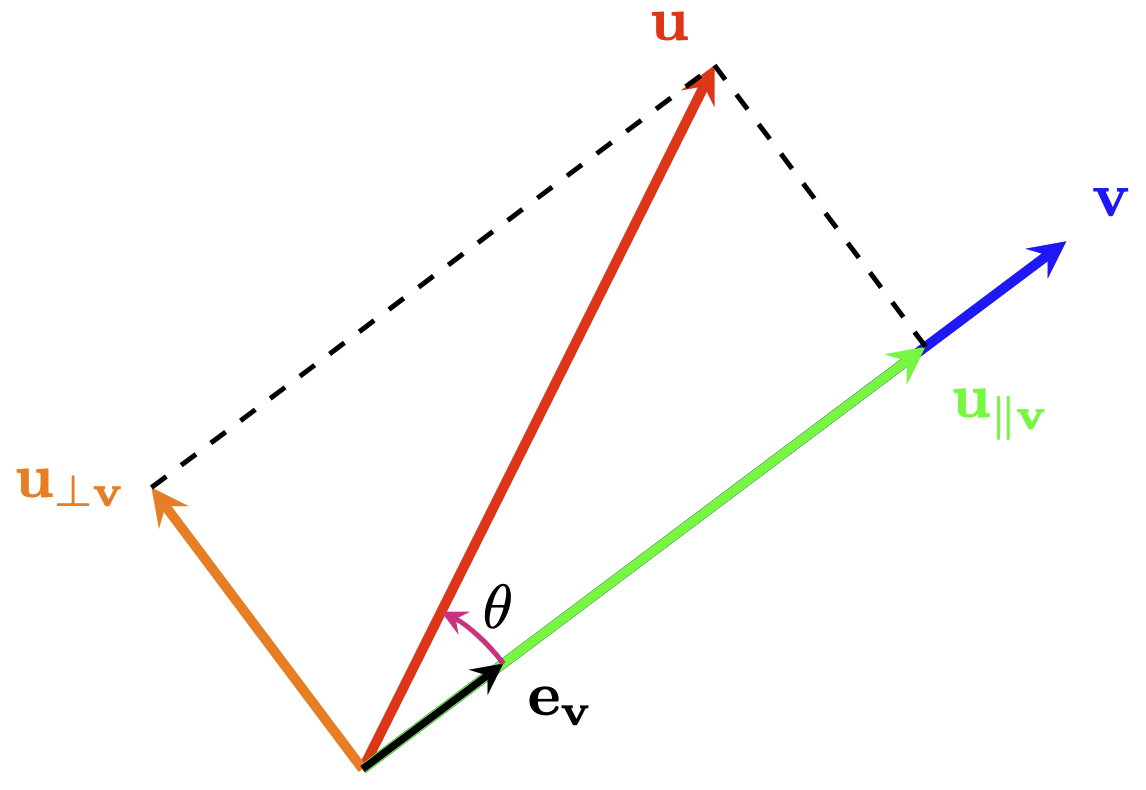
Next, we need to find the direction of the projection vector. Clearly, the projection vector points in the same direction as \(\v{v}\text{.}\) Yet, we can’t just simply multiply the length by \(\v{v}\text{.}\) If we did that, the length of the projection vector would be off by a factor of \(\|\v{v}\|\text{.}\) To fix this, we use the unit vector in the direction of \(\v{v}\text{,}\) which is \(\v{e_v} = \dfrac{\v{v}}{\|\v{v}\|}\text{.}\)
This projection vector is also denoted by \(\v{u}_{\parallel \v{v}}\) since we can think of it as the component of \(\v{u}\) that is parallel to \(\v{v}\text{.}\)
This is sometimes denoted by \(\proj_{\v{v}} \v{u}\text{.}\) The scalar \(\dfrac{\v{u} \cdot \v{v}}{\|\v{v}\|}\) is called the scalar component of \(\v{u}\) onto \(\v{v}\) and is sometimes denoted by \(\comp_{\v{v}} \v{u}\text{.}\)
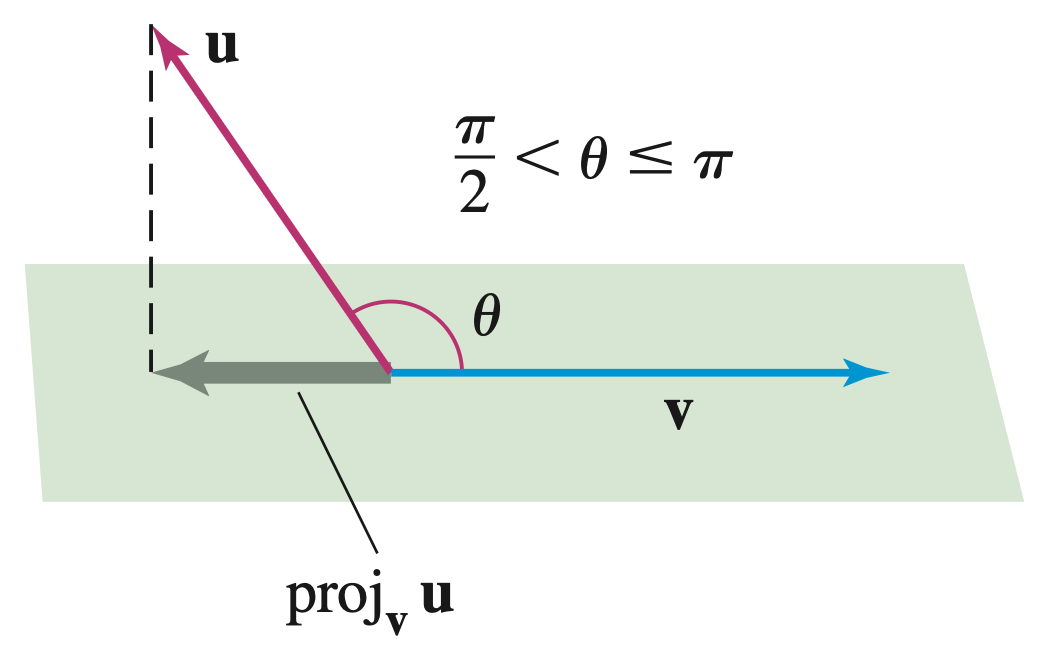
Note12.3.26.But Richard... What if the angle between the vectors is obtuse?
The previous result was derived assuming the angle between the vectors is acute. But what if the angle is obtuse, like in the diagram below? Does the formula for the projection vector still hold?
The answer is yes but the work is a bit different. Richard will encourage you to try proving the formula for the projection vector in this case as an exercise.
Let \(\theta\) be an obtuse angle, which means \(\frac{\pi}{2} \lt \theta \lt \pi\text{.}\) Using trigonometry, we can find the length of the projection vector as follows:
While there is a negative sign in front of the length, this is a positive quantity since \(\cos(\theta)\) is negative for \(\frac{\pi}{2} \lt \theta \lt \pi\text{.}\)
Next, we find the direction of the projection vector. Clearly, the projection vector points in the opposite direction as \(\v{v}\) (look at the diagram!). Then the unit vector in the direction opposite to \(\v{v}\) is \(-\dfrac{\v{v}}{\|\v{v}\|}\text{.}\)
Observe that Richard didn’t bother with the case when the angle between the vectors is a right angle. This is because the projection vector is simply the zero vector in this case since \(\v{u} \cdot \v{v} = 0\text{.}\)
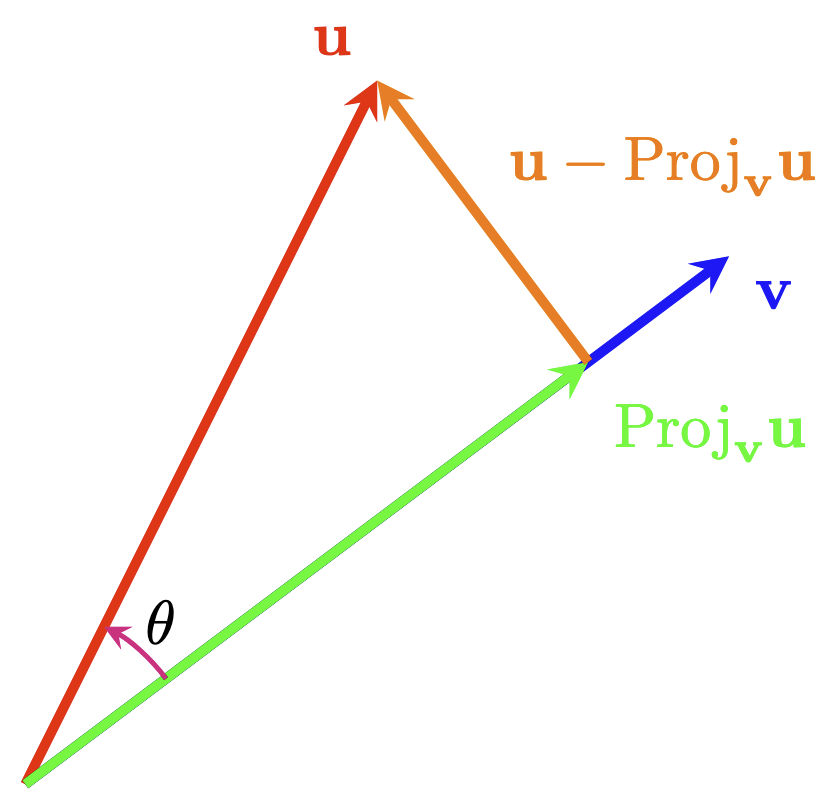
Now that we know what the projection looks like, the next question to consider is: how different is the vector from its projection? A quick subtraction \(\v{u} - \proj_{\v{v}} \v{u}\) will give us the answer.
Observe that this difference vector is orthogonal to \(\v{v}\text{.}\) This is one way that we can decompose the vector \(\v{u}\) into two components with respect to \(\v{v}\text{:}\) one component that is parallel to \(\v{v}\) (aka the projection vector) and another component that is orthogonal to \(\v{v}\text{.}\) Remember we also denote the projection vector by \(\v{u}_{\parallel \v{v}}\) (this is sometimes referred as the parallel component). Then we can denote the difference vector by \(\v{u}_{\perp \v{v}}\) (this is sometimes referred to as the normal component).
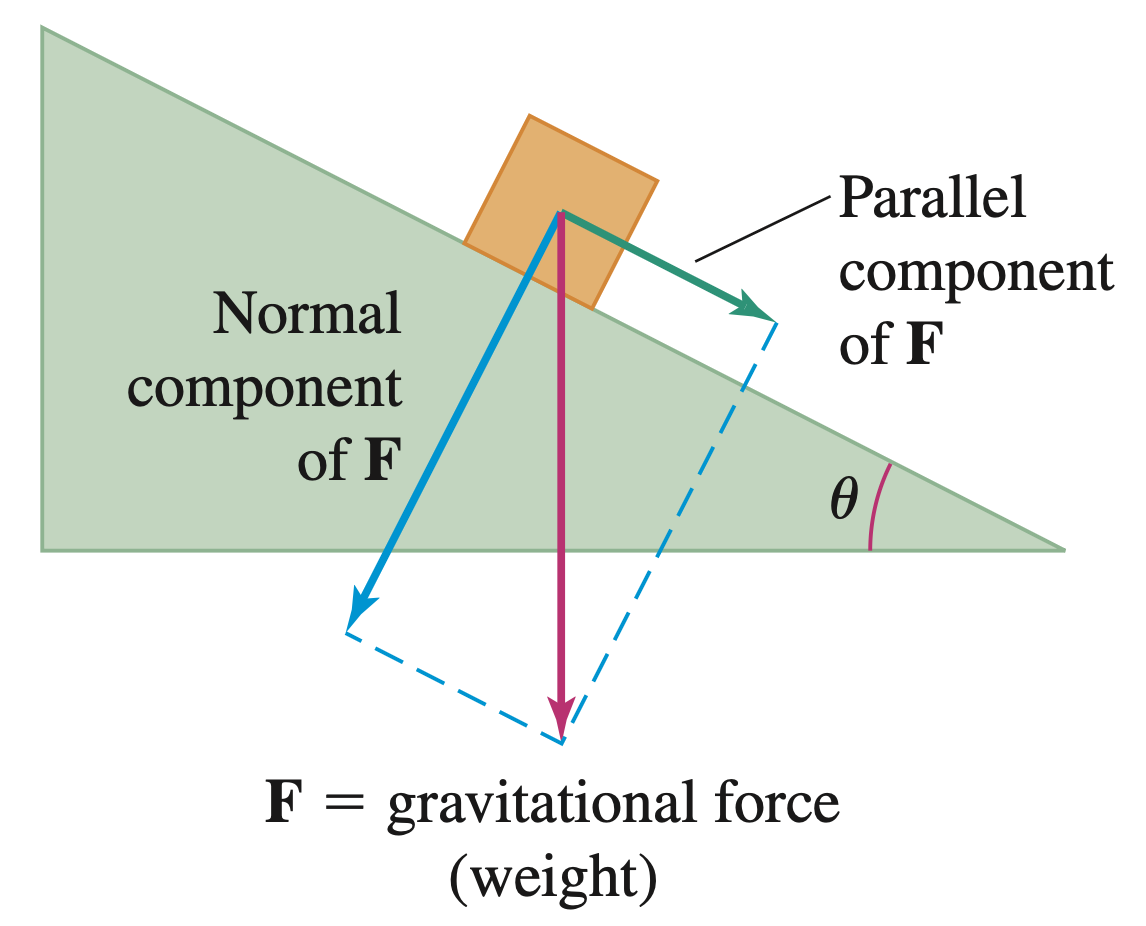
The ability to decompose vectors into orthogonal components is useful in many applications. For example, when an object rests on an inclined plane, the gravitational force acting on the object equals its weight, which is directly vertically downward. However, to analyze the motion of the object on the inclined plane, it is often helpful to decompose the gravitational force vector into two components: one parallel to the plane (which determines the tendency of the object to slide down the plane) and another perpendicular to the plane (which determines its tendency to "stick" to the plane).
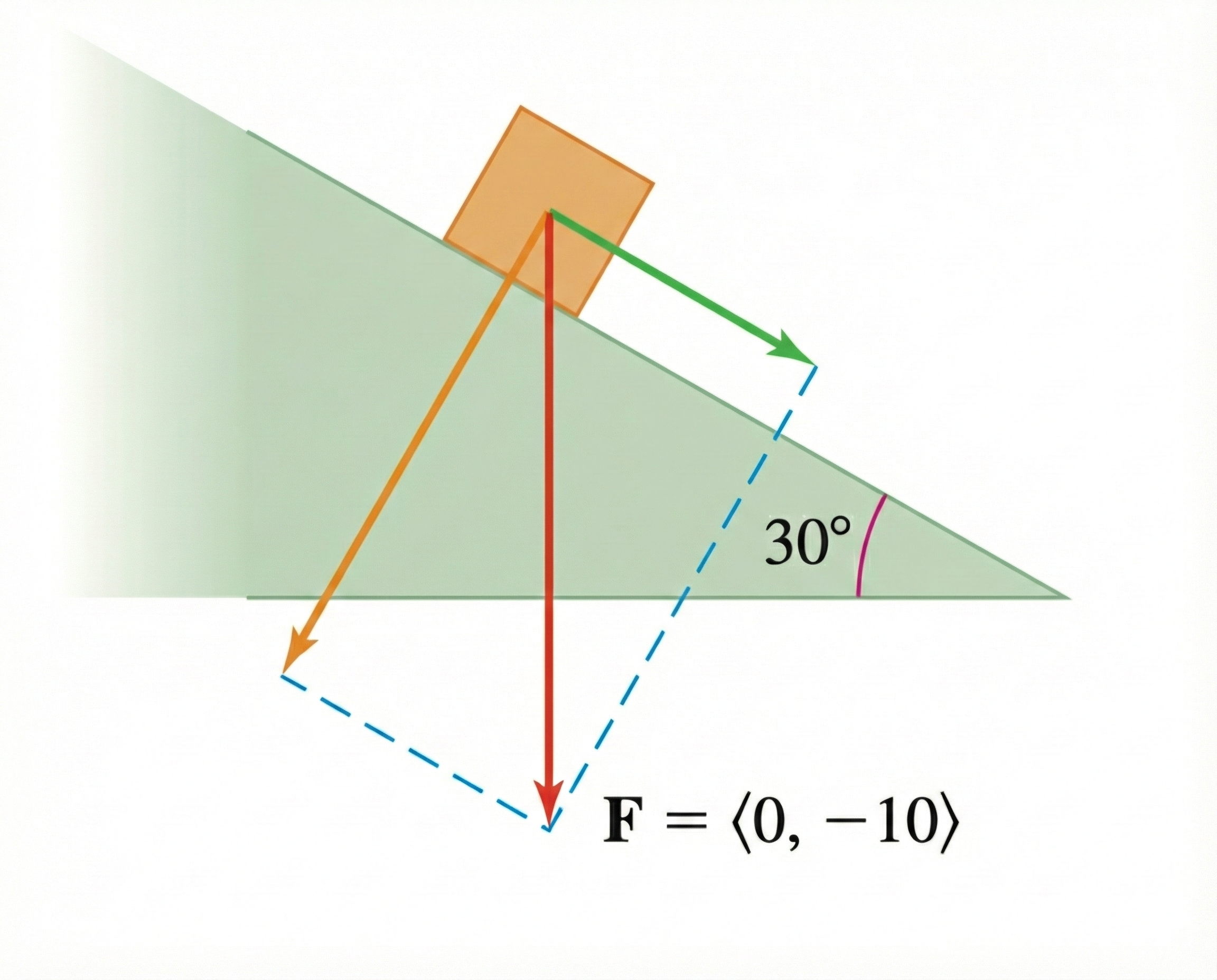
A 10-lb block rests on a plane that is inclined at 30° below the horizontal. Find the components of the gravitational force parallel and normal perpendicular to the plane.
The gravitational force \(\v{F}\) acting on the block equals the weight o the block. Using the coordinate system, the force acts in the negative \(y\)-direction, so
The problems listed below are assigned to be included in your problem set portfolio. Note that a specific selection of these problems will also form the written homework assignments. I recommend working through all of them to ensure a solid grasp of the material. Reach out to Richard for help if you get stuck or have any questions.
The solutions will be posted after the written homework due dates. If you have any questions about your work, talk to Richard and he is happy to discuss the process with you.
Determine whether the two vectors \(\la 1,1,1 \ra\) and \(\la 1,-2,-2 \ra\) are orthogonal and, if not, whether the angle between them is acute or obtuse.
We denote \(\v{v} = \la 1,1,1 \ra\) and \(\v{w} = \la 1,0,1 \ra\text{.}\) To use the formula for the cosine of the angle \(\theta\) between two vectors we need to compute the following values:
Use the properties of the dot product to evaluate the expression \(2\v{u} \cdot \lp 3\v{u} - \v{v} \rp\text{,}\) assuming that \(\v{u} \cdot \v{v} = 2\text{,}\)\(\|\v{u}\| = 1\text{,}\) and \(\|\v{v}\| = 3\text{.}\)
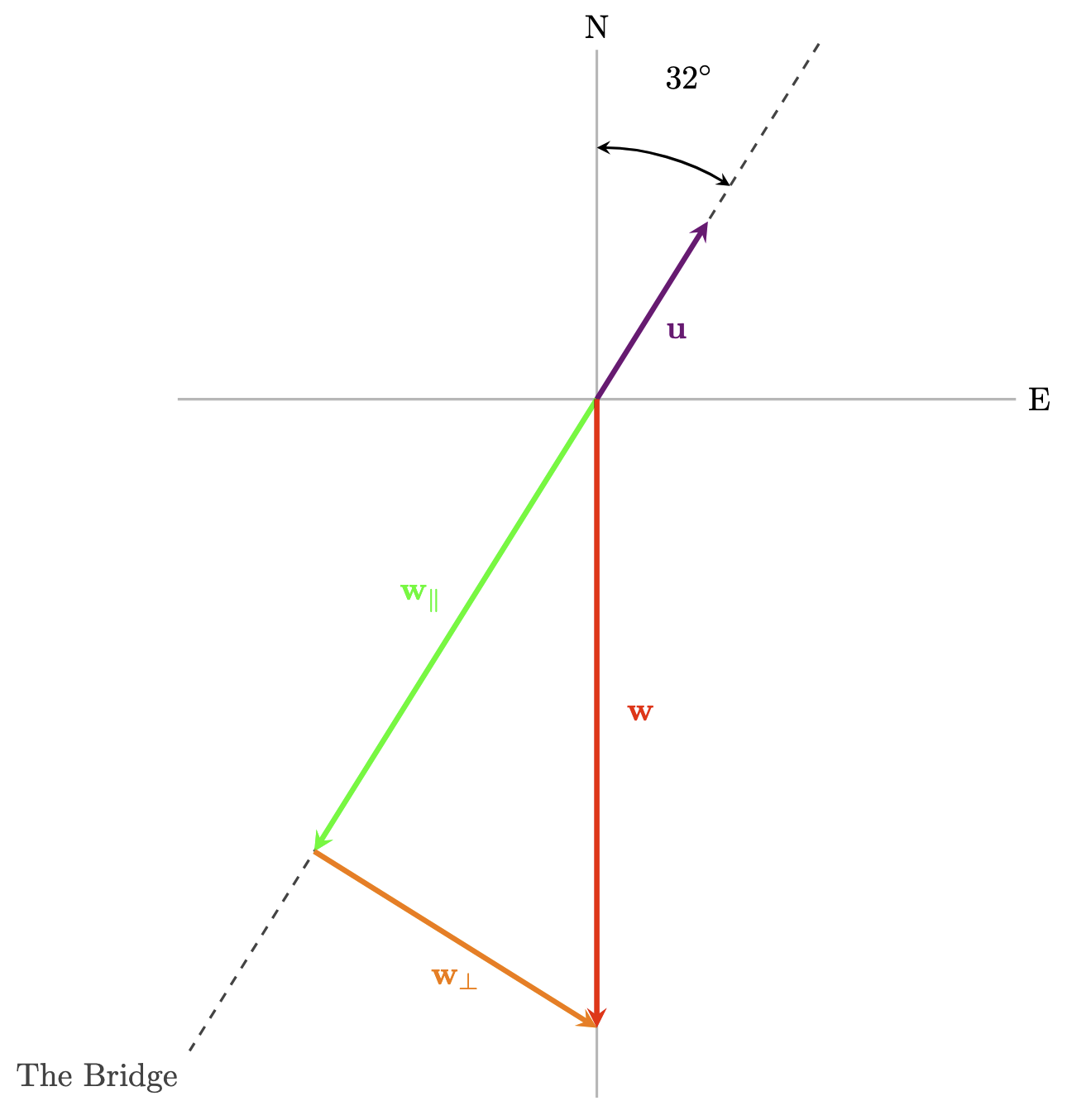
Suppose a 45 km/h wind \(\v{w}\) is blowing out of the north toward a bridge oriented \(32^\circ\) east of north. Express the corresponding wind vector as a sum of vectors, one parallel to the bridge and one perpendicular to it. Also, compute the magnitude of the perpendicular term to determine the speed of the part of the wind blowing directly at the bridge.
Richard drew a pretty diagram based on his interpretation of this problem (by saying drawing, what he really meant is coding using TikZ...). Your goal is to find the two components of the vector \(\v{w}\text{,}\) one parallel to \(\v{u}\) and one orthogonal to \(\v{u}\text{.}\)
We set up a coordinate system where North is the direction of the positive \(y\)-axis and East is the positive \(x\)-axis. Since the wind is blowing out of the North, it heads South, so \(\v{w} = \la 0, -45 \ra\text{.}\)
The bridge is oriented \(32^\circ\) East of North. We can define a unit vector \(\v{u}\) along the bridge direction using trigonometry: the \(x\)-component is \(\sin(58^\circ)\) and the \(y\)-component is \(\cos(58^\circ)\text{.}\)
Next, we find \(\v{w}_\perp\text{,}\) the vector perpendicular to the bridge by computing the difference \(\v{w}_{\perp} = \v{w} - \v{w}_{\parallel}\text{:}\)
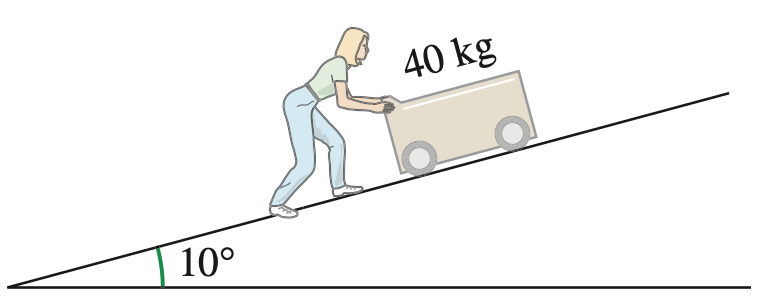
Gravity exerts a force \(\v{F}_g\) of magnitude \(40g\) newtons where \(g = 9.8\text{.}\) The magnitude of the force required to push the wagon equals the component of the force \(\v{F}_g\) along the ramp. Resolving \(\v{F}_g\) into a sum \(\v{F}_g = \v{F}_\parallel + \v{F}_\perp\text{,}\) where \(\v{F}_\parallel\) is the force along the ramp and \(\v{F}_\perp\) is the force orthogonal to the ramp, we need to find the magnitude of \(\v{F}_\parallel\text{.}\)
Actually, this is the force required to keep the wagon from sliding down the hill; any slight amount greater than this force will serve to push it up the hill.