The points \(P\text{,}\) \(Q\text{,}\) and \(R\) determine a plane with normal vector \(\v{n}\text{.}\) \(S\) lies in that plane if \(\overrightarrow{PS}\) is perpendicular to \(\v{n}\text{.}\) To find \(\v{n}\text{,}\) we compute
\begin{align*}
\overrightarrow{PQ} \times \overrightarrow{PR} \amp \la 1,-3,2 \ra \times \la 0,4,-4 \ra \\
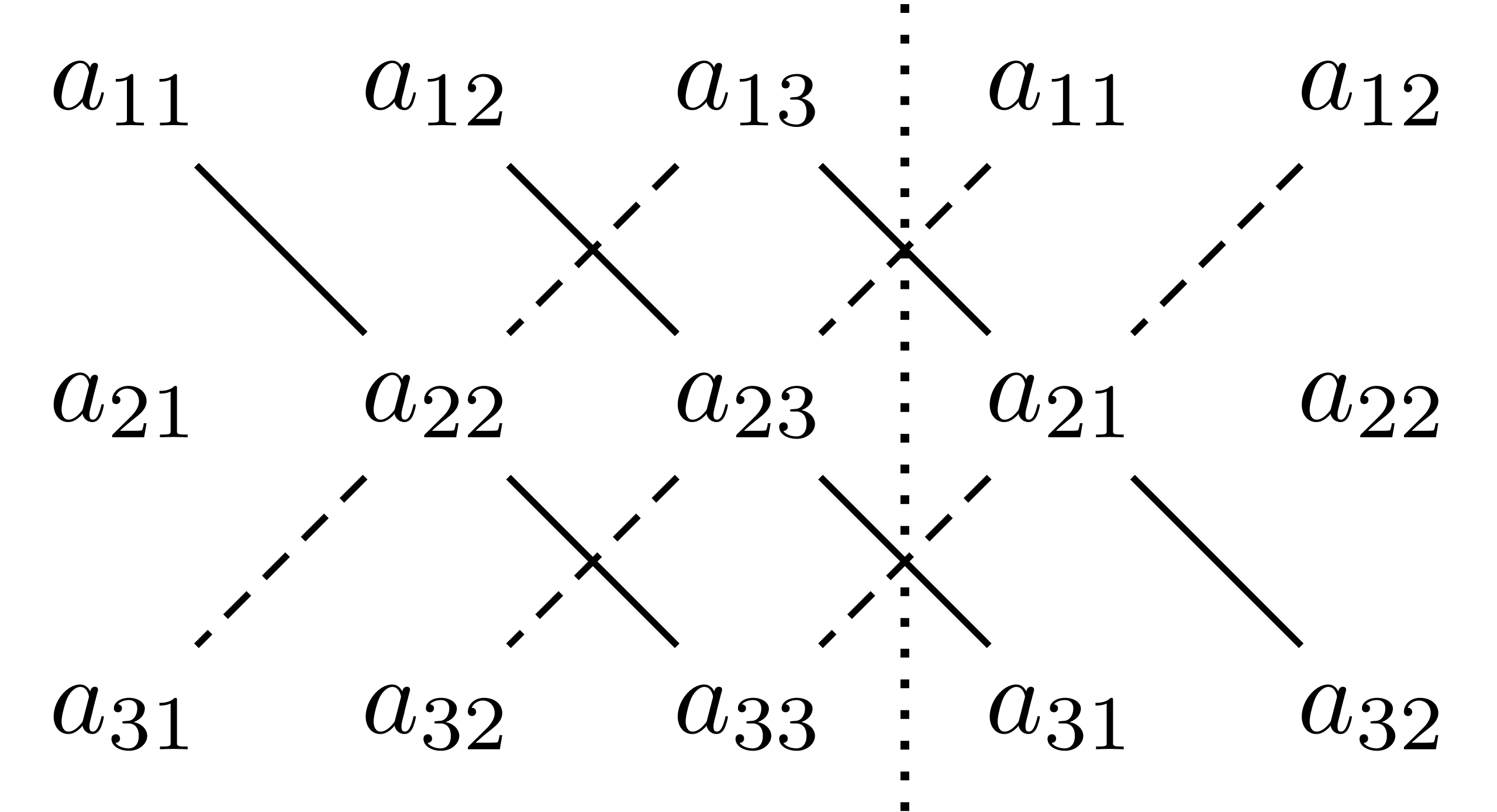
\amp= \begin{vmatrix} \v{i} \amp \v{j} \amp \v{k} \\ 1 \amp -3 \amp 2 \\ 0 \amp 4 \amp -4 \end{vmatrix} \\
\amp= \begin{vmatrix} -3 \amp 2 \\ 4 \amp -4 \end{vmatrix} \v{i} - \begin{vmatrix} 1 \amp 2 \\ 0 \amp -4 \end{vmatrix} \v{j} + \begin{vmatrix} 1 \amp -3 \\ 0 \amp 4 \end{vmatrix} \v{k}\\
\amp= 4\v{i} + 4\v{j} + 4\v{k}
\end{align*}
Since
\begin{equation*}
\la 4,4,4 \ra \cdot \overrightarrow{PS} = \la 4,4,4 \ra \cdot \la 5,-2,-3 \ra = 0
\end{equation*}
the normal vector is also orthogonal to \(\overrightarrow{PS}\text{,}\) so that the vector \(\overrightarrow{PS}\text{,}\) and therefore the point \(S\text{,}\) also lies in the plane. So all four points lie in a plane.
To find the area of the quadrilateral of which they are the vectices, divide the quadrilateral into the two triangles \(\triangle PQR\) and \(\triangle SQR\text{.}\) The area of each of these triangles is given by half the magnitude of the cross product of two of its sides. First, we must compute various vectors:
\begin{align*}
\overrightarrow{PQ} \amp= \la 3-2, 1-4, 6-4 \ra = \la 1,-3,2 \ra\\
\overrightarrow{PR} \amp= \la 2-2, 8-4, 0-4 \ra = \la 0,4,-4 \ra\\
\overrightarrow{SQ} \amp= \la 3-7, 1-2, 6-1 \ra = \la -4,-1,5 \ra\\
\overrightarrow{SR} \amp= \la 2-7, 8-2, 0-1 \ra = \la -5,6,-1 \ra
\end{align*}
To find the area of \(\triangle PQR\text{,}\) we must compute \(\overrightarrow{PQ} \times \overrightarrow{PR}\text{;}\) to find the area of \(\triangle SQR\text{,}\) we must compute \(\overrightarrow{SQ} \times \overrightarrow{SR}\text{.}\)
\begin{align*}
\overrightarrow{PQ} \times \overrightarrow{PR} \amp= \begin{vmatrix} \v{i} \amp \v{j} \amp \v{k} \\ 1 \amp -3 \amp 2 \\ 0 \amp 4 \amp -4 \end{vmatrix} = 4\v{i} + 4\v{j} + 4\v{k}\\
\overrightarrow{SQ} \times \overrightarrow{SR} \amp= \begin{vmatrix} \v{i} \amp \v{j} \amp \v{k} \\ -4 \amp -1 \amp 5 \\ -5 \amp 6 \amp -1 \end{vmatrix} = -29\v{i} - 29\v{j} - 29\v{k}
\end{align*}
The area of the quadrilateral, \(\c{S}\text{,}\) is given by
\begin{align*}
\c{S} \amp= \frac{1}{2} \| 4\v{i} + 4\v{j} + 4\v{k} \| + \frac{1}{2} \| -29\v{i} - 29\v{j} - 29\v{k} \| \\
\amp= \frac{1}{2} \lp 4\sqrt{3} + 29 \sqrt{3} \rp \\
\amp= \frac{33\sqrt{3}}{2} \\
\amp\approx 28.58
\end{align*}