In this section, we transition from single-variable calculus to the geometry of the plane by introducing vectors. We will learn how to describe quantities that have both magnitude and direction, perform algebraic operations on them, and use them to model physical forces.
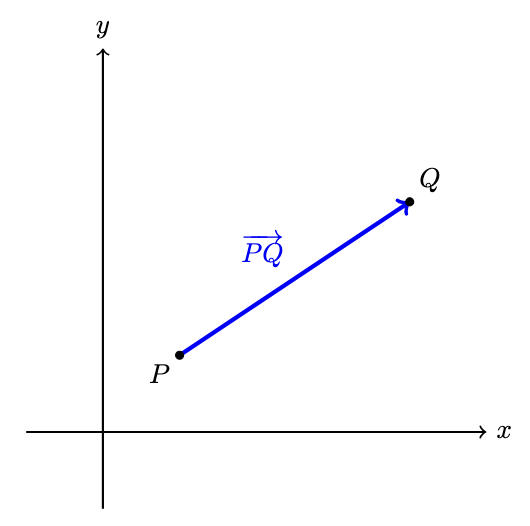
Let’s first define what a vector is in \(\R^2\text{.}\) A vector in \(\R^2\) is an object determined by two points in the plane: an initial point \(P\) (the tail) and a terminal point \(Q\) (the tip). We write
Note12.1.2.Why is \(\v{v}\) bolded but not \(P\) or \(Q\text{?}\)
This is a notation convention. There is a difference between a vector and a point (or scalar). To specify the difference, we usually bold the vector notation.
For example, if you see something like \(\v{u}\text{,}\) then this indicates that \(\v{u}\) is a vector. As a comparison, if you see something like \(u\text{,}\) then this indicates that \(u\) is a scalar (a number).
That is because the arrow notation specifies the tail and the tip of the vector! There is a difference between \(\overrightarrow{PQ}\) and \(\overrightarrow{QP}\text{!}\) They have the opposite tail and tip, so they point in opposite directions!
Another reason why sometimes we use the arrow notation is because it is super difficult to write in bold font! This is why Richard often writes \(\overrightarrow{\, v\, }\) on the board to indicate the vector \(\v{v}\text{,}\) since he can’t write in bold font easily...
In \(\R^2\text{,}\) each point is represented by an ordered pair of real numbers. Then we can define the components of a vector using the ordered pairs of the two points as follows.
P.S.: If you are a linear algebra-ist and want to use the notation of the column vectors instead, be my guest! Just remember that Richard prefers the column vector notation over the sharp-y angle bracket notation (but he is teaching calculus, not linear algebra, so he will have to live with it).
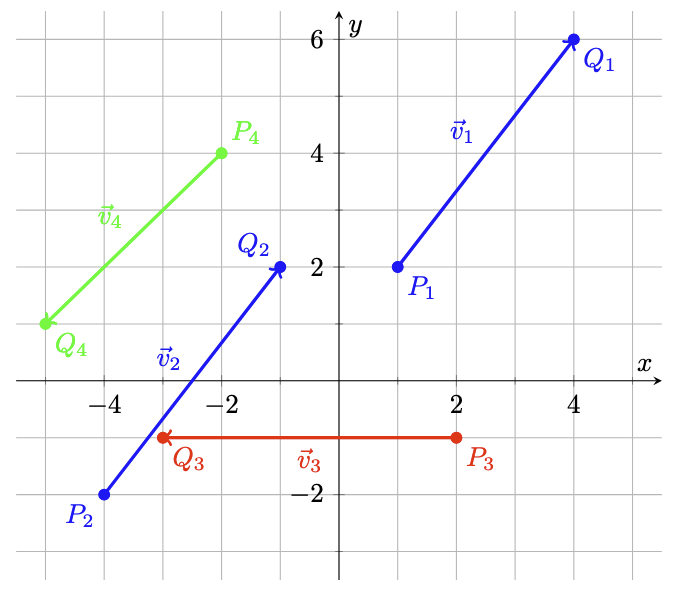
Observe that \(\v{v}_1\) and \(\v{v}_2\) are parallel. Moreover, \(\v{v}_2\) is a translation of \(\v{v}_1\) (i.e., we can obtain \(\v{v}_2\) by sliding \(\v{v}_1\) to the left and down). We call these two vectors equivalent vectors if one is a translation of the other.
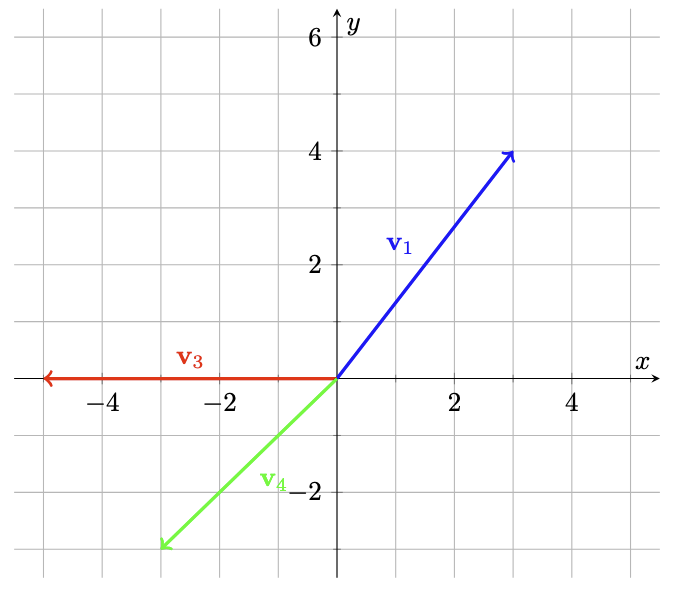
In fact, two vectors are equivalent if and only if they have the same components. So instead of studying millions of the same vectors in different locations, we can just study one representative vector for each group of equivalent vectors.
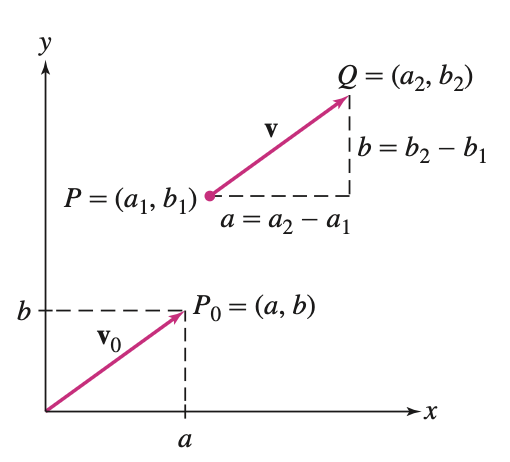
But which location should we choose for the representative vector? To keep things easier, we usually choose the representative vector whose tail is at the origin \((0,0)\text{.}\) Then the tip of the vector is at the coordinate point \((a,b)\text{,}\) where \(\langle a,b \rangle\) are the components of the vector. This is called the position vector.
Given a vector \(\v{v} = \langle a,b \rangle\text{,}\) we can determine its magnitude using the Pythagorean Theorem, as demonstrated in the figure below.
The magnitude of a vector is really called the \(\boldsymbol{\ell^2}\) norm or the Euclidean norm of a vector in more advanced math courses. In general, norms must satisfy the following three properties:
\(\|\v{v}\| \geq 0\text{,}\) with \(\|\v{v}\| = 0\) if and only if \(\v{v} = \v{0}\text{.}\)
\(\|\v{v} + \v{w}\| \leq \|\v{v}\| + \|\v{w}\|\) for any two vectors \(\v{v}\) and \(\v{w}\text{,}\) with equallity only if \(\v{v} = 0\text{,}\)\(\v{w} = 0\text{,}\) or if \(\v{w} = \lambda\v{v}\) where \(\lambda \geq 0\text{.}\) (This is the famous triangle inequality).
This isn’t a linear algebra or functional analysis class, so we won’t go deeper into norms here. If you are interested, feel free to do more digging on your own (or ask Richard!).
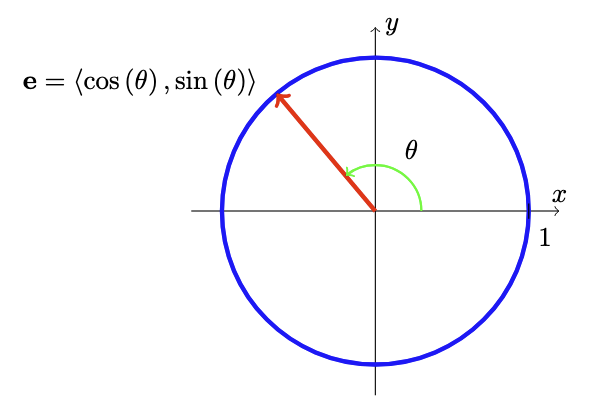
Now let’s discuss the direction of a vector. The direction of a vector tells us where the vector is pointing. We can indicate the direction of a vector by using the vector itself. As you imagine, the magnitude of a vector has nothing to do with its direction, so we sometimes use a unit vector, which is a vector of length \(1\text{,}\) to indicate the direction, when it is not necessary to specify length.
If we have a unit vector whose tail is at the origin, then its tip lies on the unit circle. We usually denote a unit vector by \(\v{e}\text{,}\) defined as
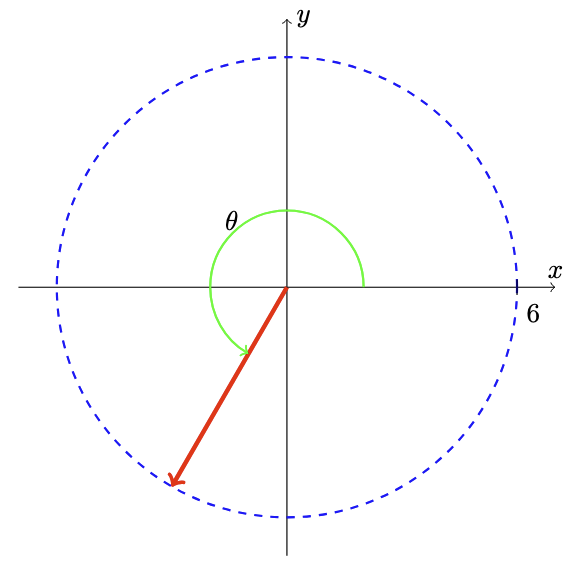
But what if we are given an arbitrary non-zero vector and we want to find a unit vector in the same direction? One way to do so is to divide the vector by its magnitude (multiplying a positive scalar doesn’t change the direction of a vector). That is, given \(\v{v}\text{,}\) the unit vector in the direction of \(\v{v}\) is
Observe that we essentially multiplied the unit vector (a vector) by the magnitude (a scalar) to obtain the desired vector. This is one of the two operations in vector algebra, which we will discuss in the next section.
Vectors live in a place called the vector space. Usually, two operations are defined in a vector space, and they are vector addition and scalar multiplication. We will discuss these two operations in this section.
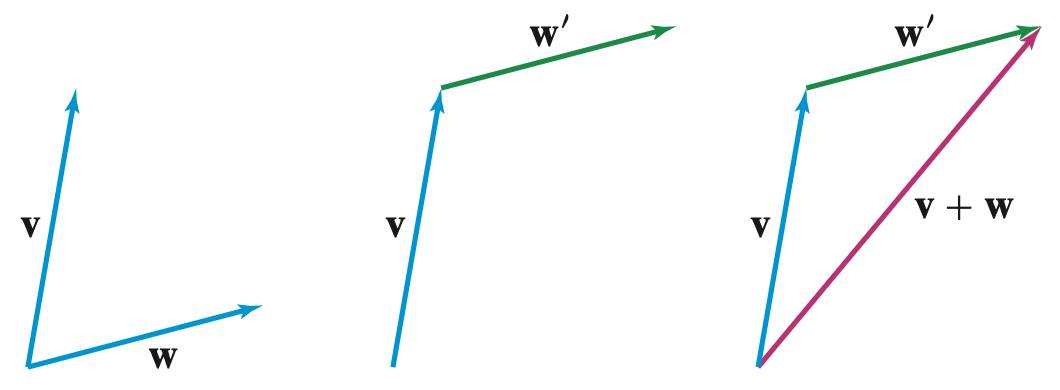
Vector addition tells us how to add two vectors together. Geometrically speaking, we can imagine a vector as the movement from the tail to the tip. Then adding two vectors means performing the movements one after another. That is, we will need to find the equivalent vector of the second vector whose tail is at the tip of the first vector, and the resulting vector is the vector from the tail of the first vector to the tip of the second vector. This is sometimes referred to as the Triangle Law.
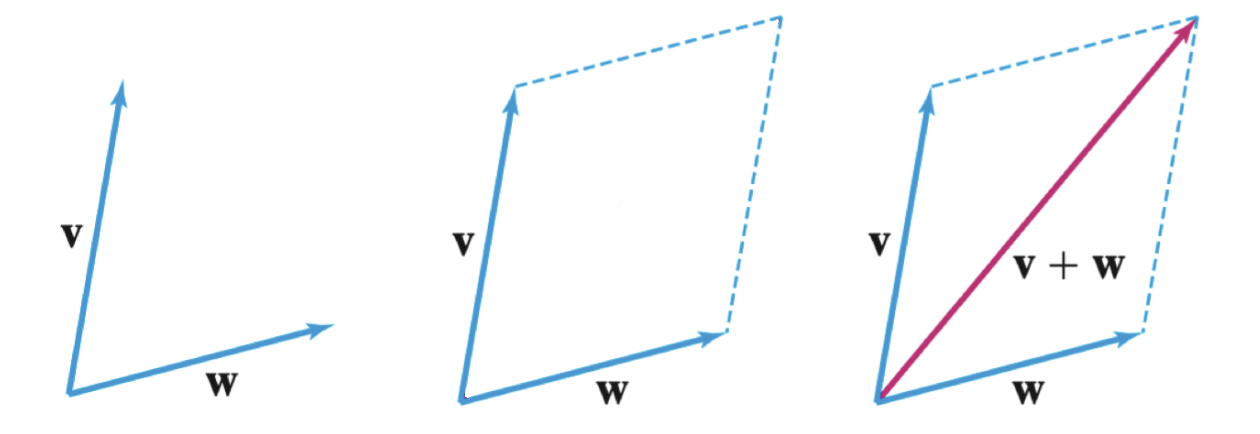
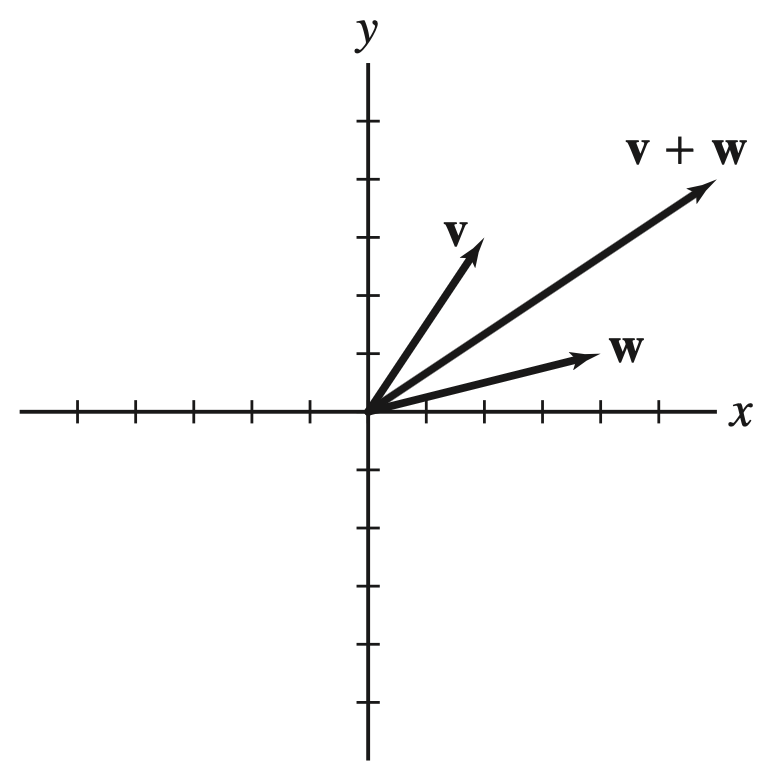
But sometimes we are given the position vectors and their tails are both at the origin (or at the same point). Alternatively, rather than finding the equivalent vector of the second vector, we can construct a parallelogram using the two vectors as adjacent sides, and the resulting vector is the diagonal of the parallelogram starting from the common tail of the two vectors. This is called the Parallelogram Law.
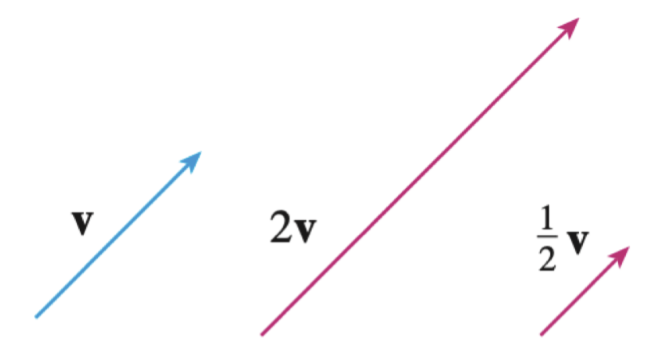
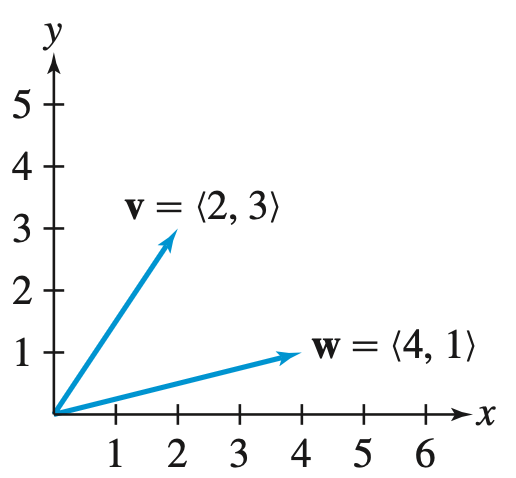
Now let’s look at scalar multiplication. The term scalar refers to a real number. That is, scalar multiplication tells us how to multiply a vector by a real number. The scalar will "scale" or "resize" the vector.
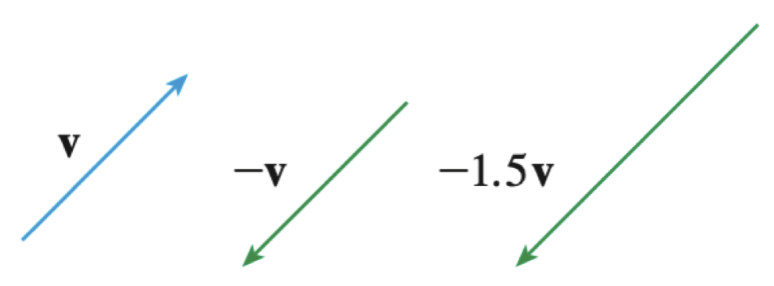
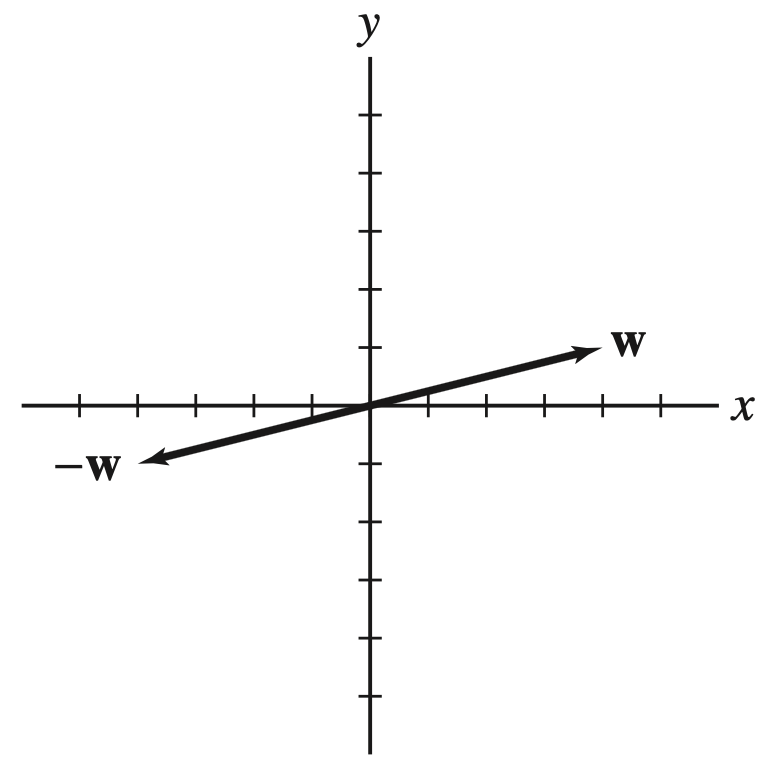
When the scalar is negative, the resulting vector points in the opposite direction, and the size of the vector is scaled by the absolute value of the scalar.
But what if the scalar is zero? We can quickly see that the magnitude of the resulting vector is zero, so the resulting vector is the zero vector, denoted by \(\v{0}\text{.}\) We can imagine the zero vector has the tail and tip at the same point, which means it doesn’t have a specific direction. Alternatively, we can say that the zero vector points in all directions.
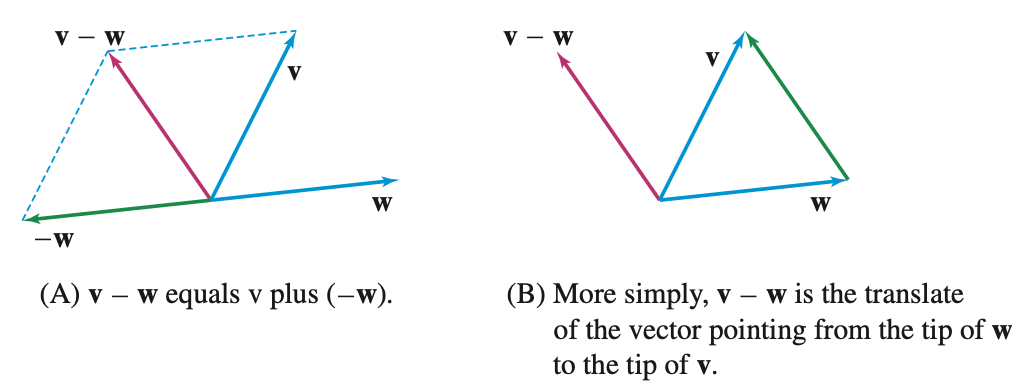
Once we have vector addition and scalar multiplication defined, we can subtract two vectors. Recall subtraction is really the same thing as adding the opposite. That is,
But we work with components of vectors as well... How do we perform these operations using components? It turns out that vector addition and scalar multiplication can be performed component-wise.
Observe that vector operations are (kind of) similar to operations with numbers component-wise. Then some properties of number operations also hold for vector operations.
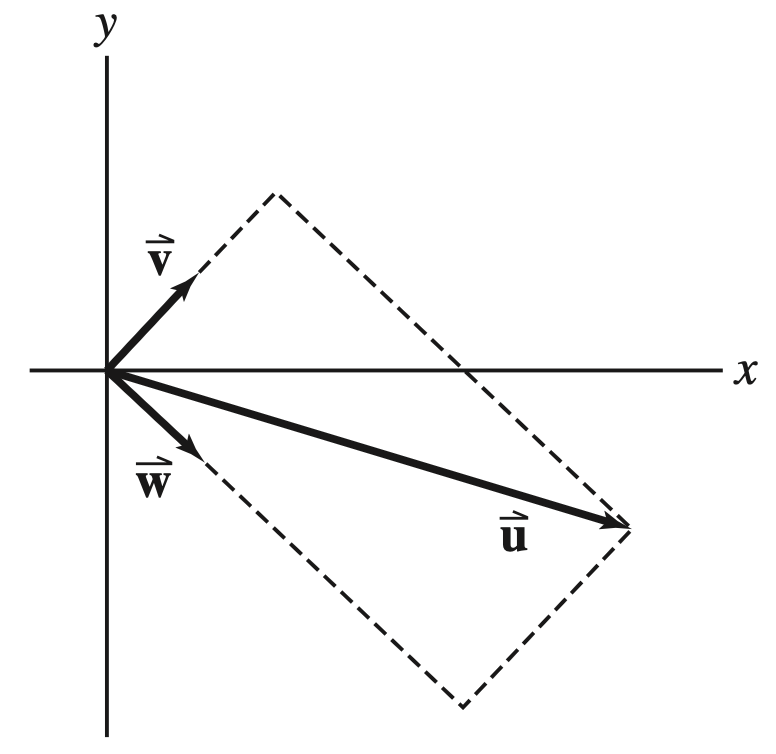
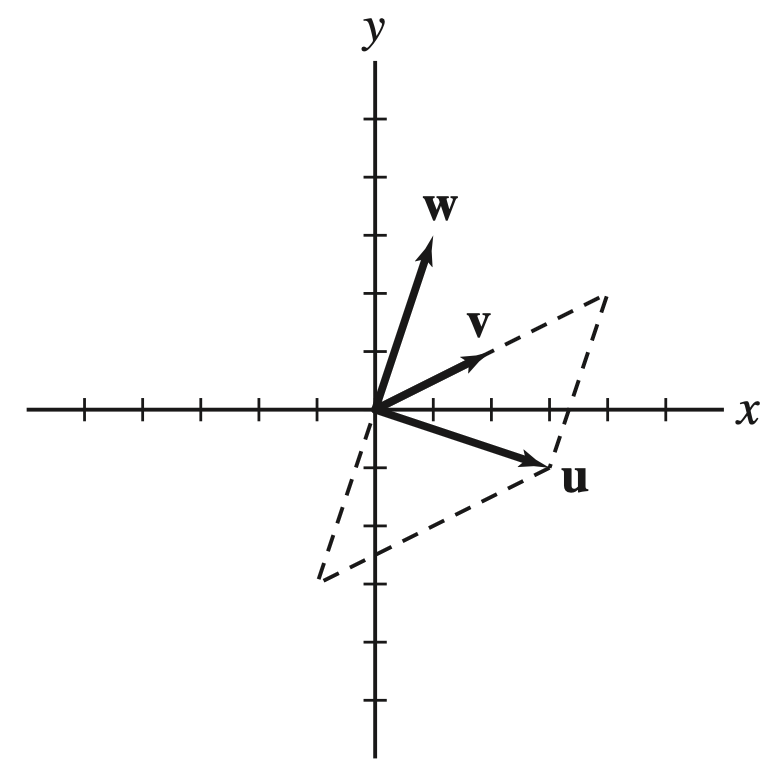
Consider the vectors \(\v{v}\) and \(\v{w}\) are the two building blocks that we can use to construct the vector \(\v{u}\text{.}\) The moves we can do are the scalar multiplications (to resize the building blocks) and the vector addition (to combine the building blocks).
So, the question here is: how should we resize the building blocks \(\v{v}\) and \(\v{w}\) such that when we combine them together, we get the desired vector \(\v{u}\text{?}\)
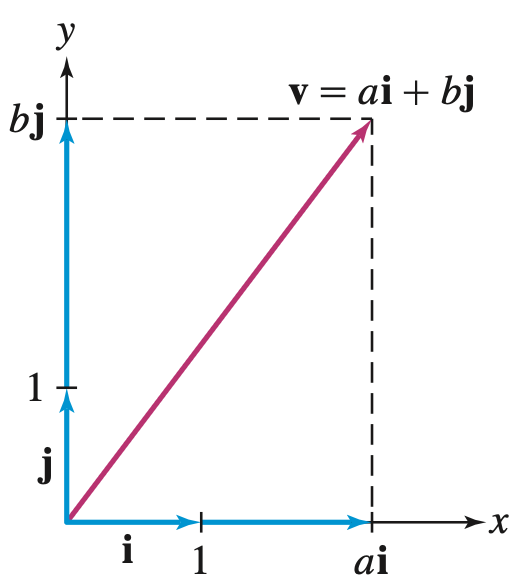
One of the reasons why linear combinations are important is that we can decompose vectors into linear combinations of other vectors. Usually, we want to decompose vectors into linear combinations of the simplest vectors possible. In \(\R^2\text{,}\) the simplest vectors are the standard basis vectors, defined as
Any vector in \(\R^2\) can be expressed as a linear combination of these two vectors. Or using fancy linear algebra terminology, the set \(\{\v{i},\v{j}\}\)spans the vector space \(\R^2\text{.}\)
The building blocks here are the standard basis vectors \(\v{i} = \la 1,0 \ra\) and \(\v{j} = \la 0,1 \ra\text{.}\) So we will need to perform scalar multiplications and vector additions to obtain the resulting vector.
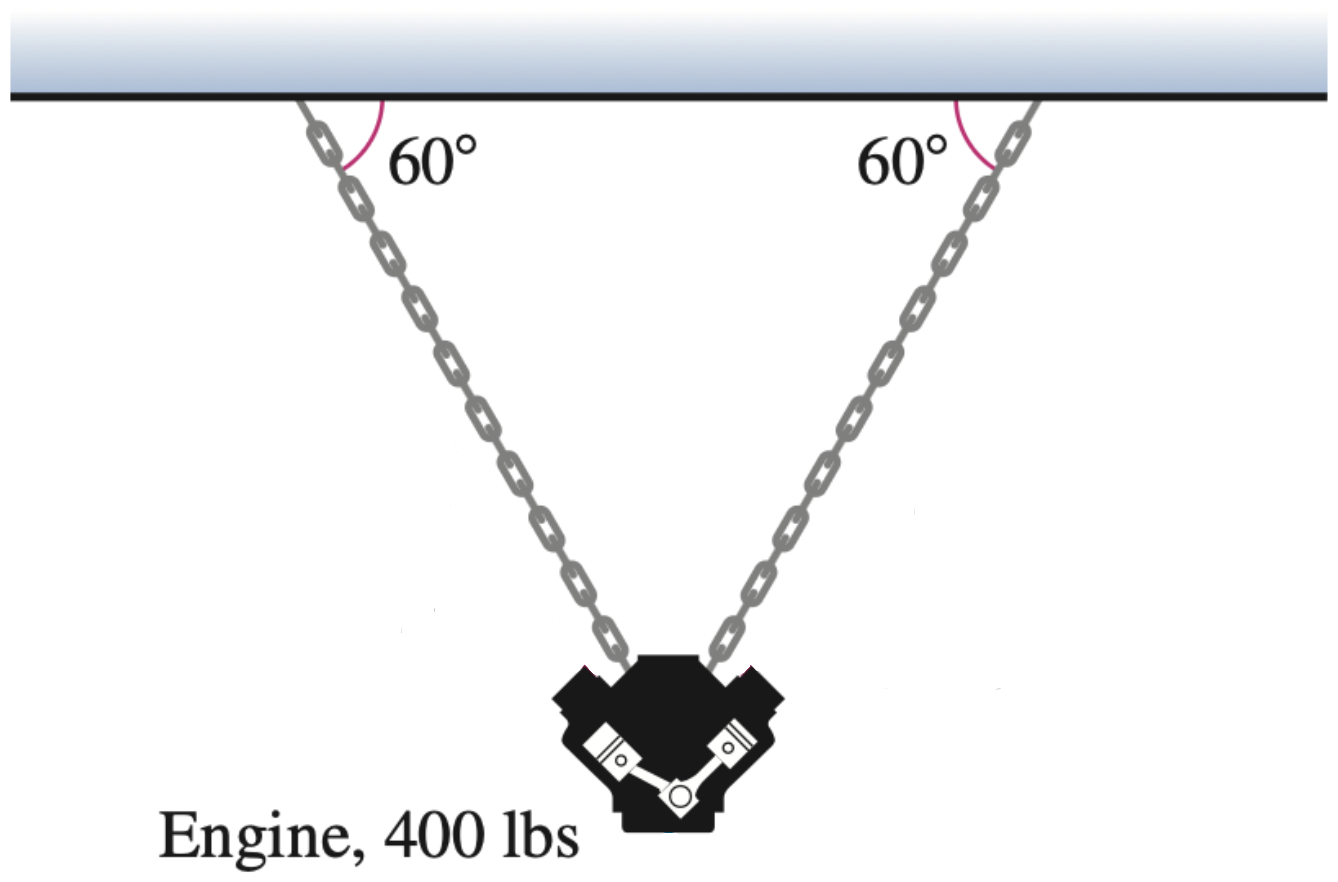
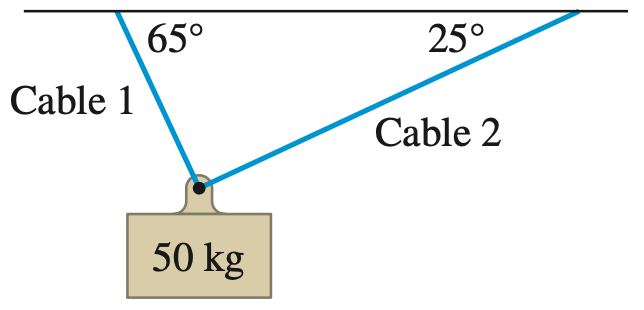
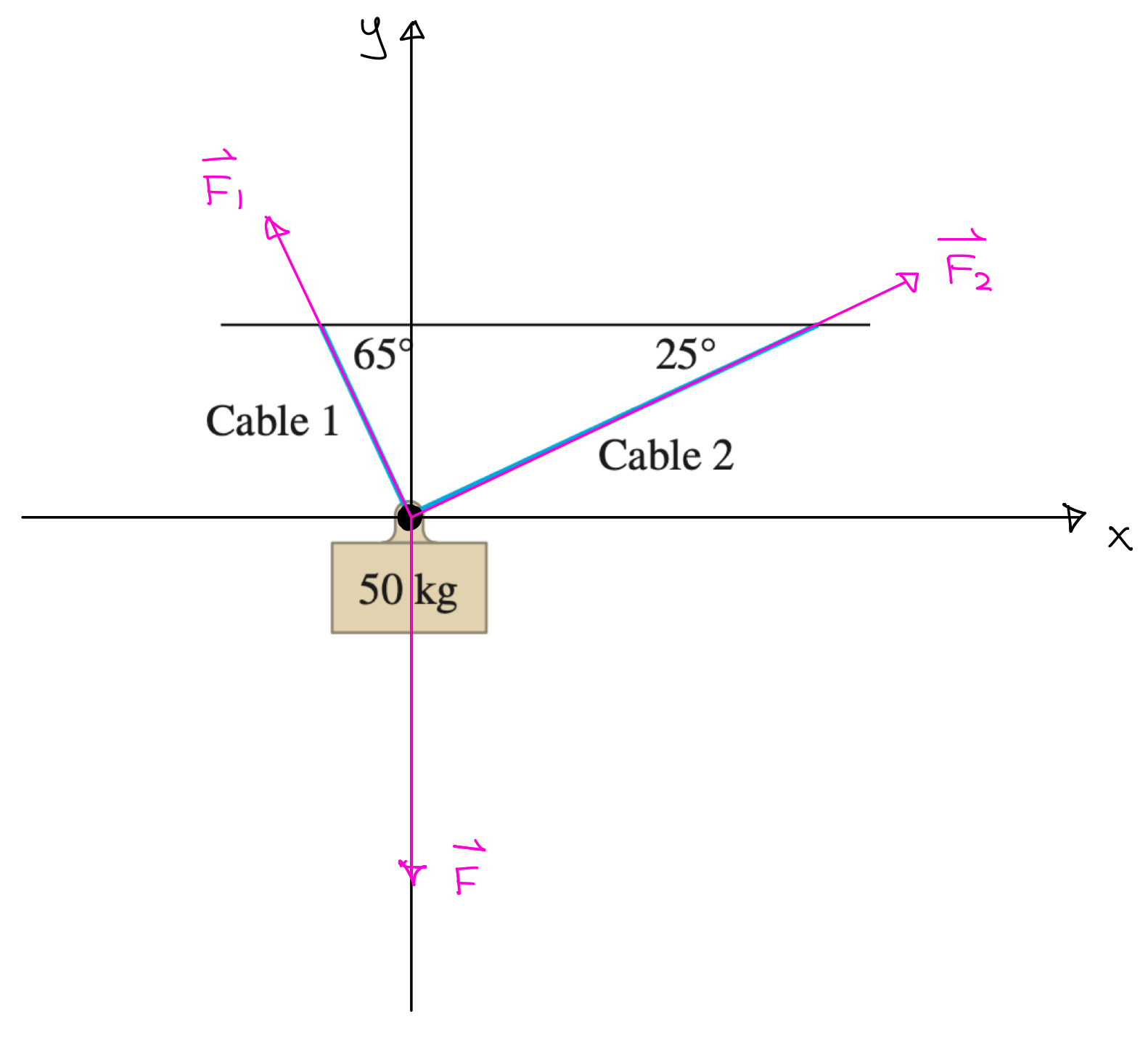
Vectors are widely used in various fields, including physics, engineering, computer science, and more. They are particularly useful in representing quantities that have both magnitude and direction, such as velocity, force, and acceleration. In this section, we will explore a basic application of vectors: force vectors.
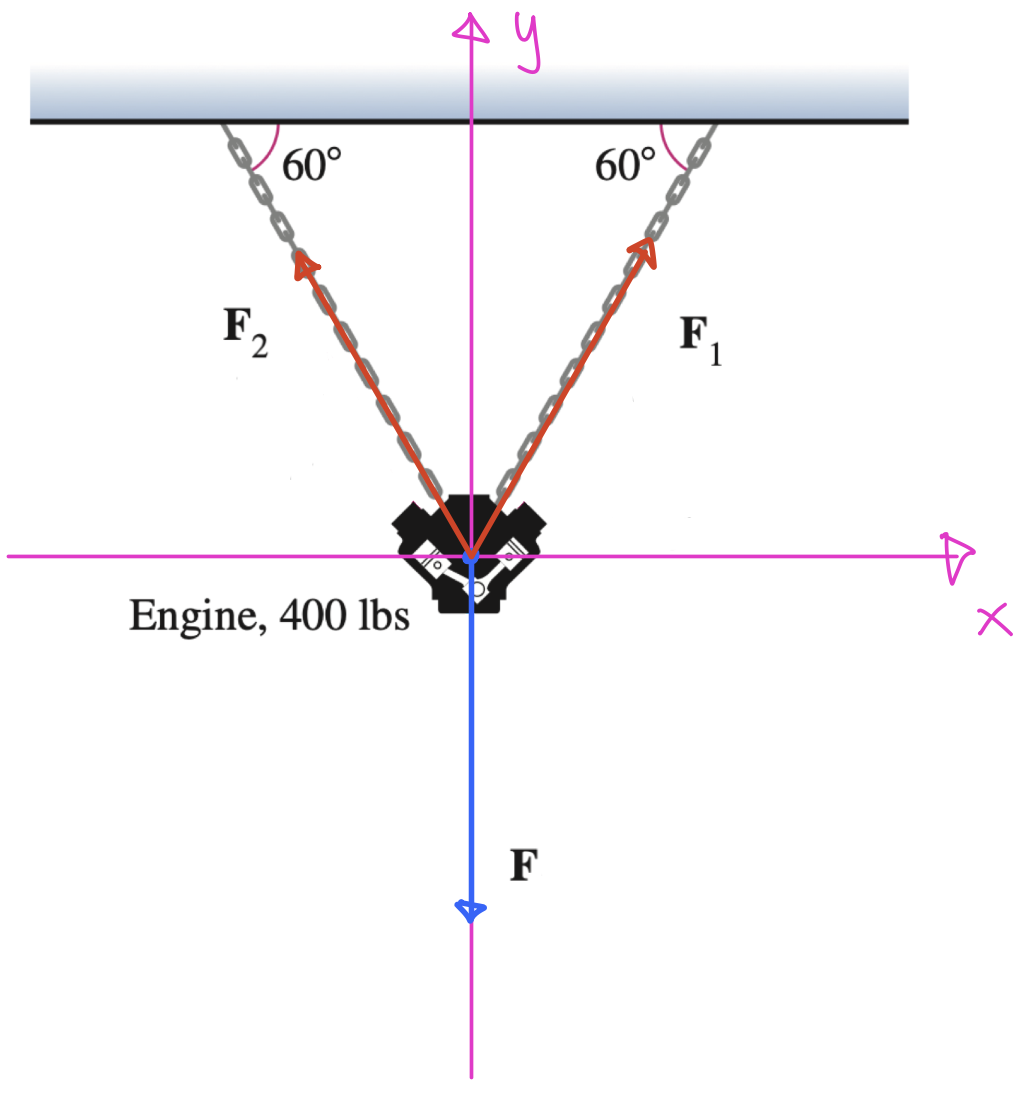
Let \(\v{F}_1\) and \(\v{F}_2\) denote the forces exerted by the chains on the engine and let \(\v{F}_3\) be the downward force due to the weight of the engine. Then we can place the origin at the point where the engine is located and construct a Cartesian coordinate plane.
The problems listed below are assigned to be included in your problem set portfolio. Note that a specific selection of these problems will also form the written homework assignments. I recommend working through all of them to ensure a solid grasp of the material. Reach out to Richard for help if you get stuck or have any questions.
The solutions will be posted after the written homework due dates. If you have any questions about your work, talk to Richard and he is happy to discuss the process with you.
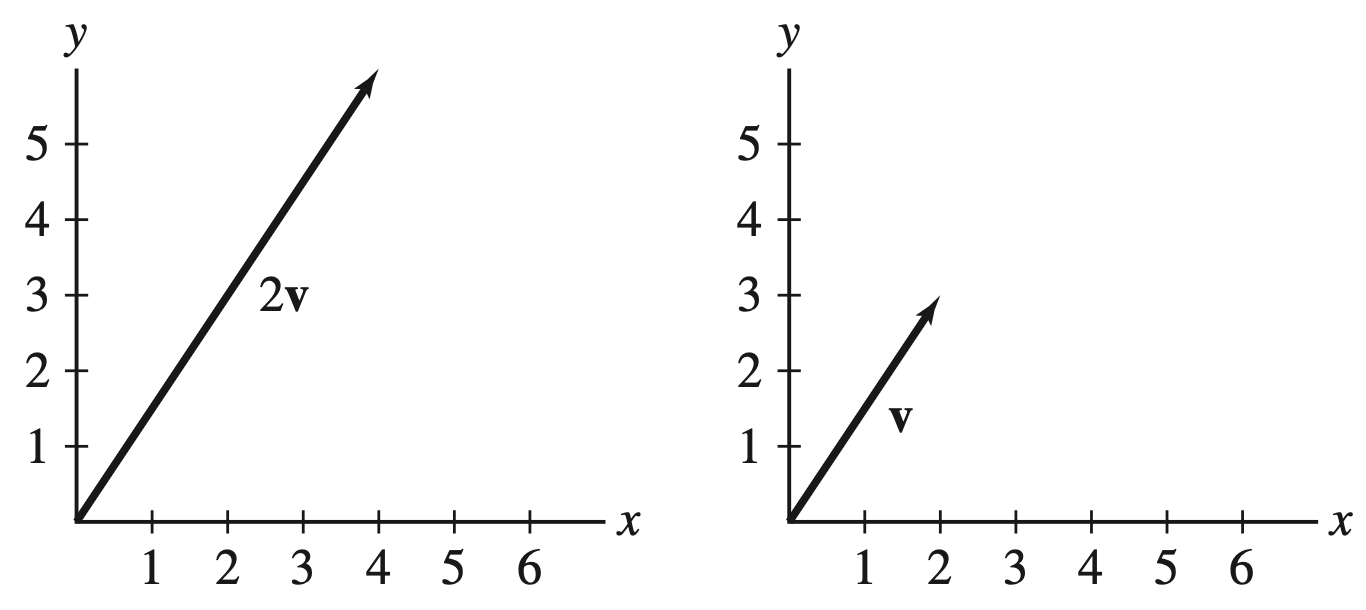
The scalar multiple \(2\v{v}\) points in the same direction as \(\v{v}\) and its length is twice the length of \(\v{v}\text{.}\) It is the vector \(2\v{v} = \la 4, 6 \ra\text{.}\)
Are \(\overrightarrow{AB}\) and \(\overrightarrow{PQ}\) parallel if \(A=(1,1)\text{,}\)\(B=(3,4)\text{,}\)\(P=(1,1)\text{,}\) and \(Q=(7,10)\text{?}\) And if so, do they point in the same direction?